ROS Noetic Ninjemys meets Ubuntu 20.04
ROS Noetic Ninjemys is the most milestone version of ROS1! why?
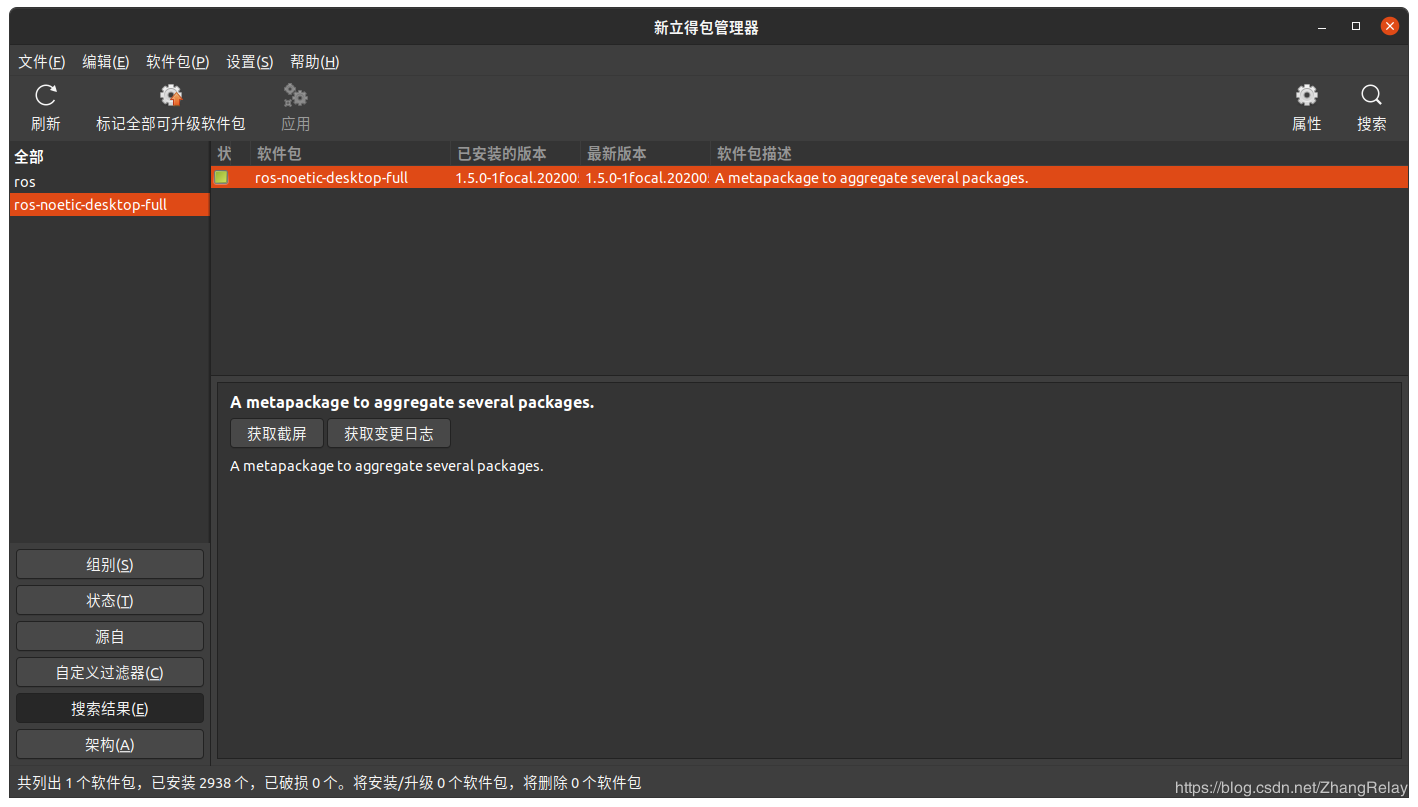
The installation process with Synaptic is more concise:
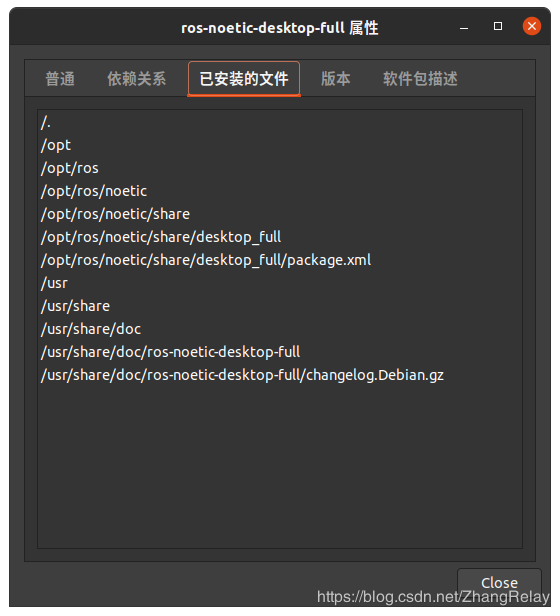
The detailed installation directory is shown in the figure above.
ROS1Noetic and ROS2Foxy are installed at the same time, you can refer to the following code to select the default environment:
# ROS 1.0 noetic or ROS 2.0 foxy
echo Hello, ROS 1.0 or ROS 2.0?1=noetic 2=foxy
read ROS
if(($ROS==1));then
source /opt/ros/noetic/setup.bash
# export ROS_PACKAGE_PATH=/home/ros/RobTool/ROS1/Wiki/src:/home/relaybot/RobTool/Cozmo/ros/src:$ROS_PACKAGE_PATH
# source /home/ros/RobTool/ROS1/Wiki/devel/setup.bash
# export ROS_MASTER_URI=http://192.168.1.100:11311
# export ROS_IP=192.168.1.100
echo "noetic"elif(($ROS==2));then
source /opt/ros/foxy/setup.bash
echo "foxy"else
echo "Non-ROS"
fi
Select 1, and enter roscore:
Select 2 and enter ros2:
- roslaunch gazebo_ros range_world.launch
This example can demonstrate the reading of a virtual distance sensor:
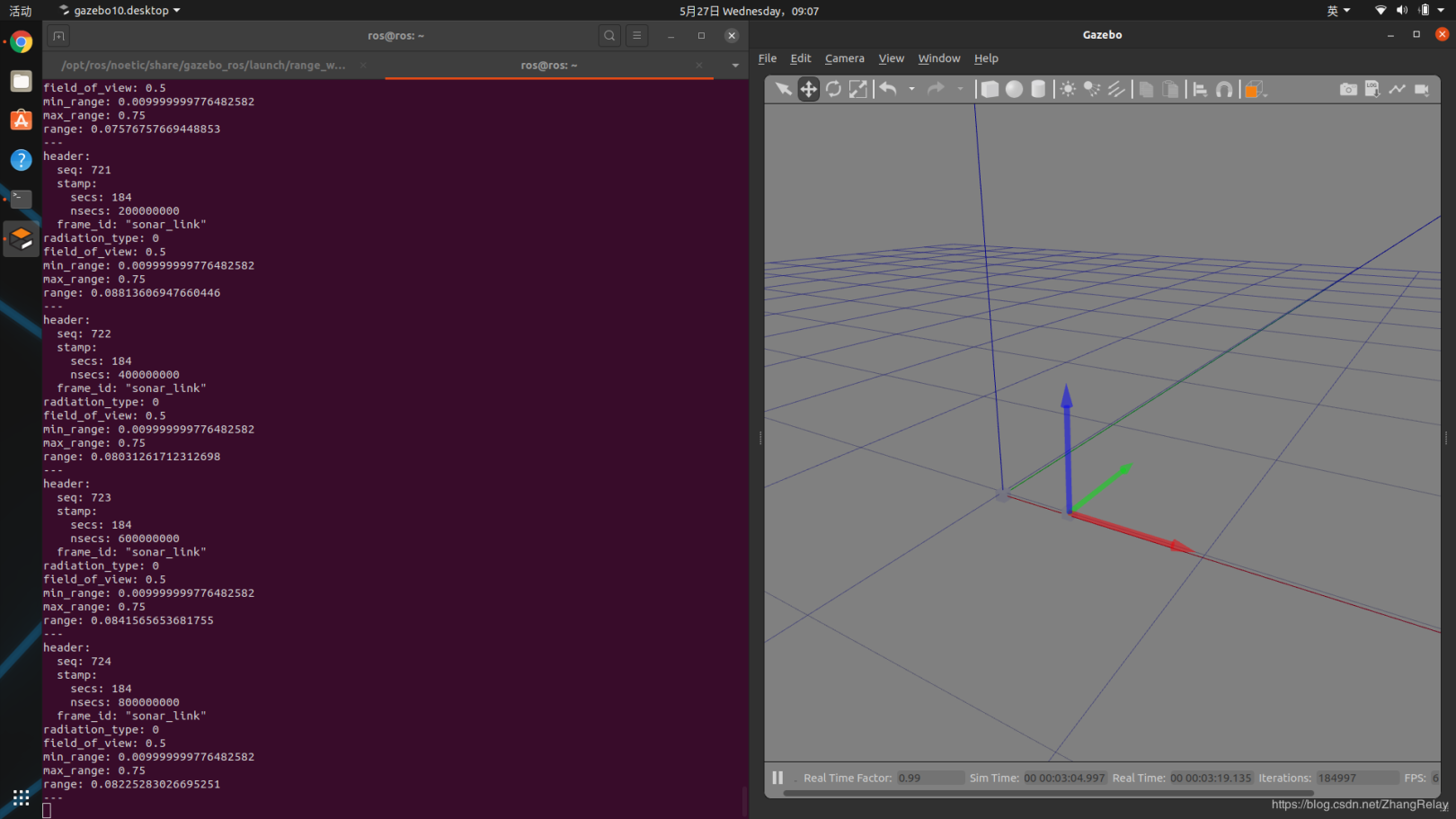
The distance is 0.08
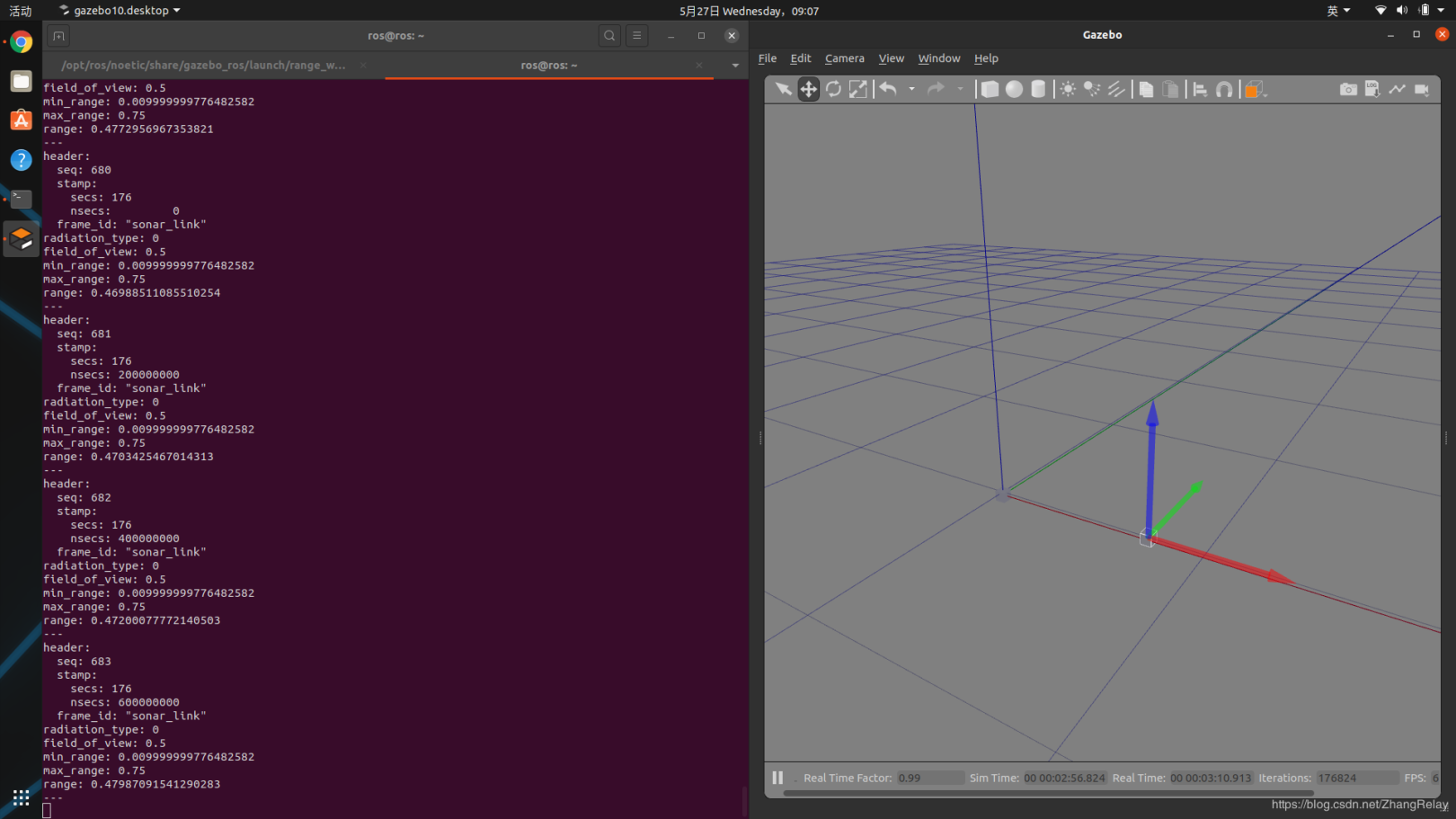
The distance is 0.48
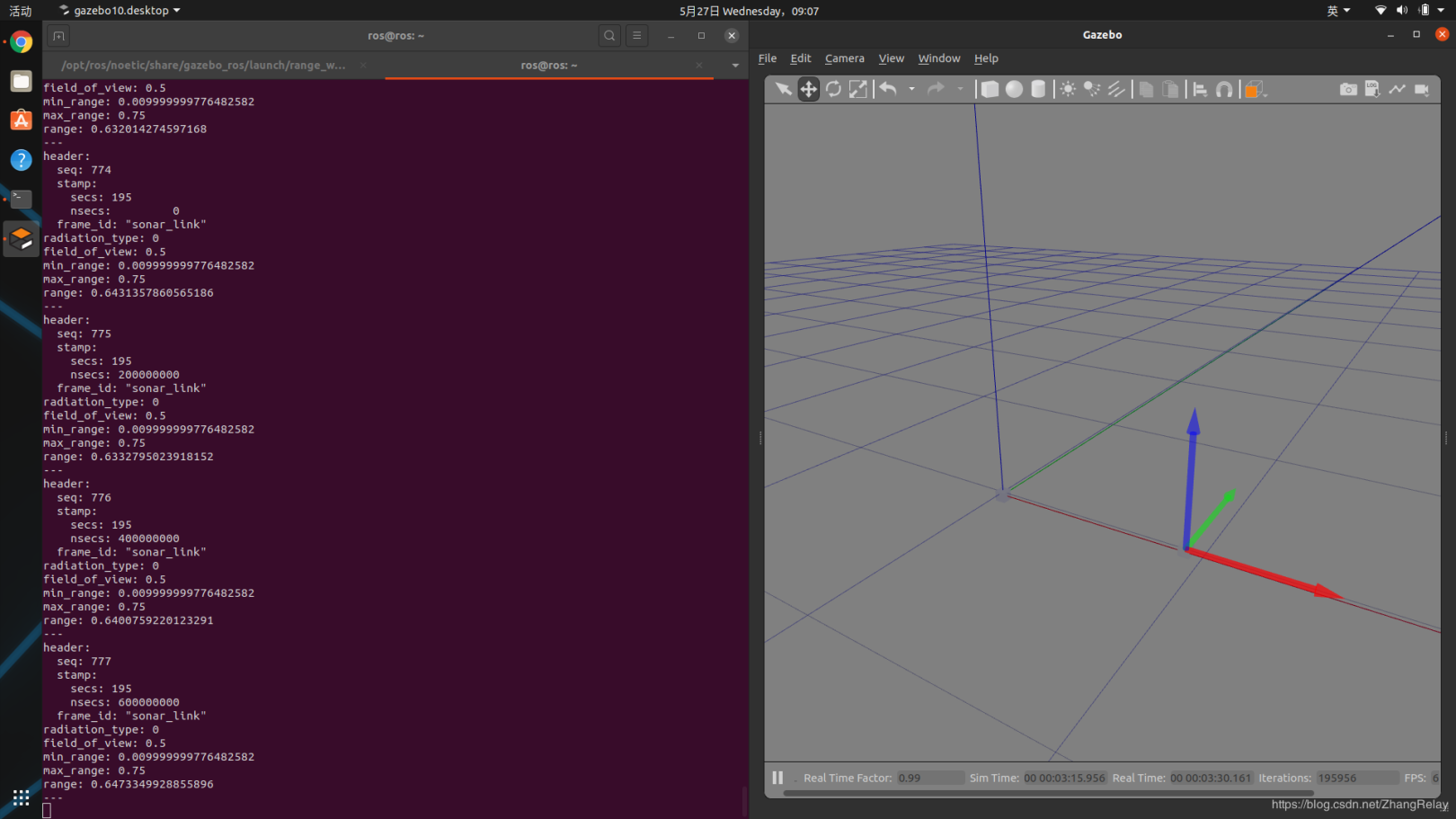
The distance is 0.65
range_world.launch
<? xml version="1.0"?><launch><!-- these are the arguments you can pass this launch file,for example paused:=true--><arg name="paused"default="false"/><arg name="use_sim_time"default="true"/><arg name="extra_gazebo_args"default=""/><arg name="gui"default="true"/><arg name="debug"default="false"/><arg name="physics"default="ode"/><arg name="verbose"default="true"/><arg name="output"default="screen"/><arg name="world"default="gazebo_ros_range"/><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find gazebo_plugins)/test/test_worlds/$(arg world).world"/><arg name="paused" value="$(arg paused)"/><arg name="use_sim_time" value="$(arg use_sim_time)"/><arg name="extra_gazebo_args" value="$(arg extra_gazebo_args)"/><arg name="gui" value="$(arg gui)"/><arg name="debug" value="$(arg debug)"/><arg name="physics" value="$(arg physics)"/><arg name="verbose" value="$(arg verbose)"/><arg name="output" value="$(arg output)"/></include></launch>
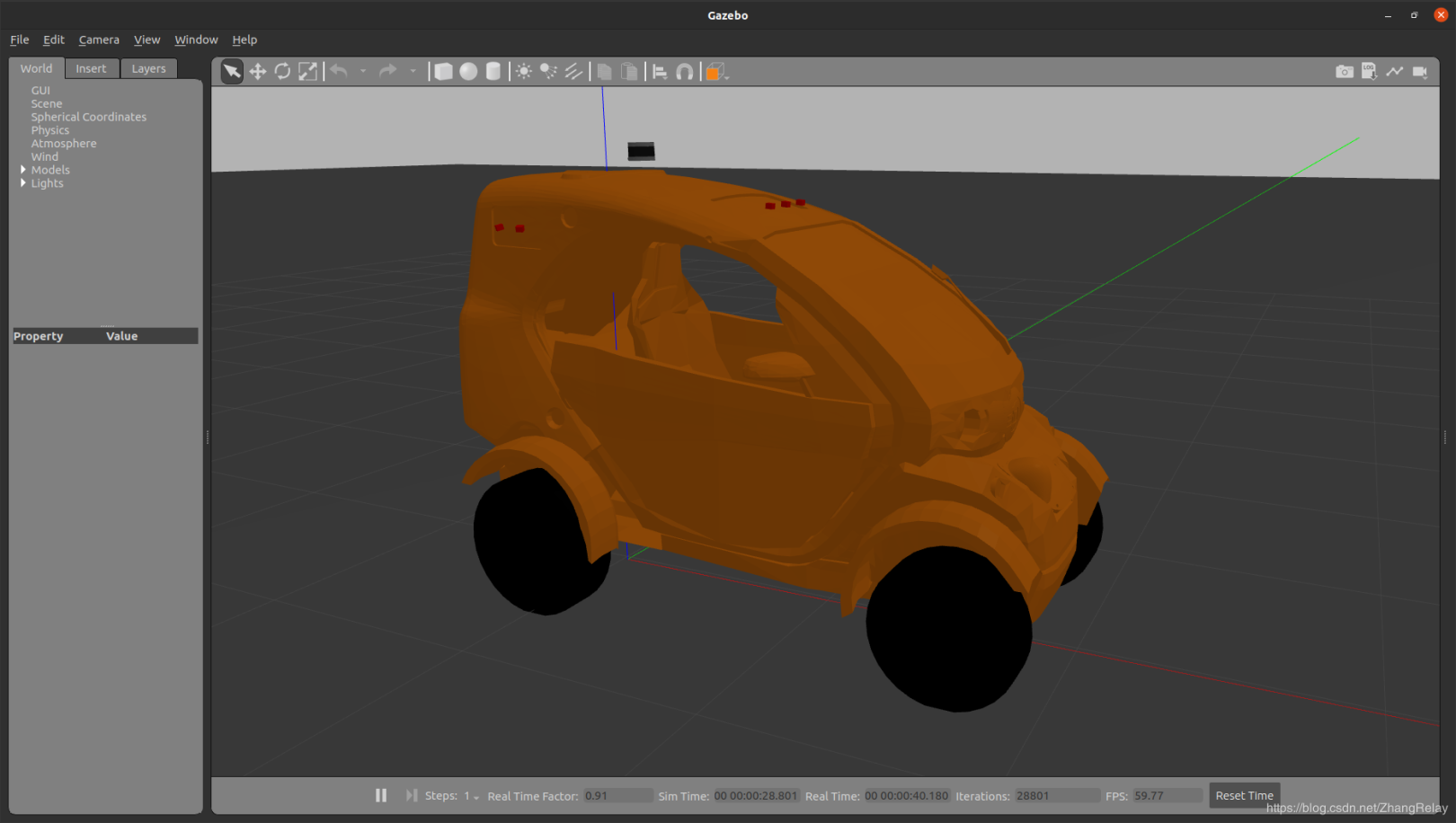
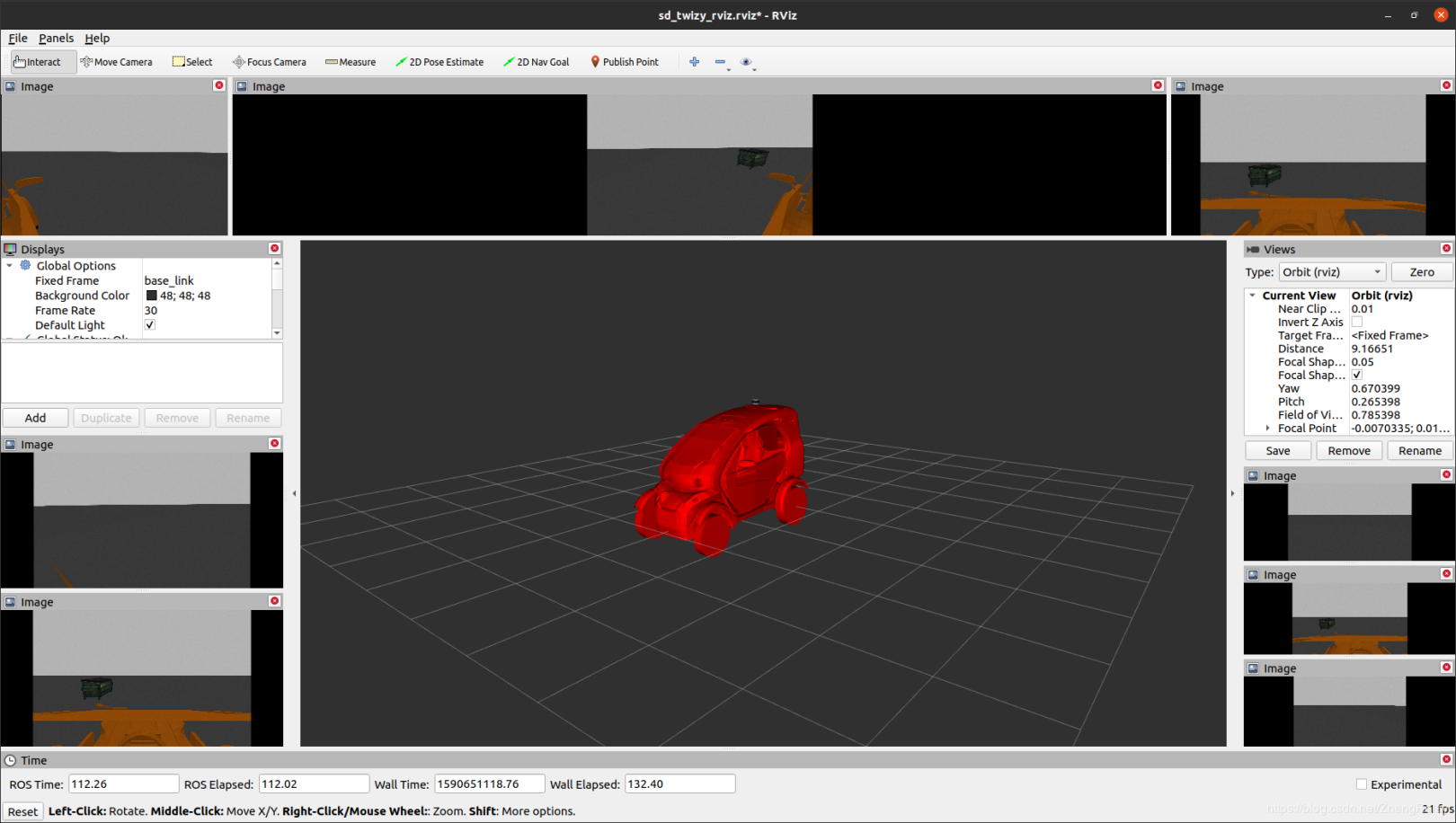
For another example, kinetic and melodic can be used directly in noetic by simply making some modifications.
such as:
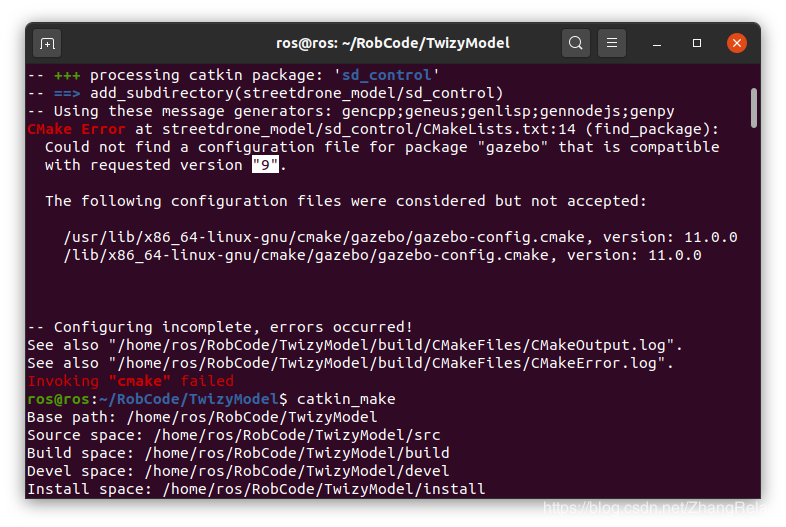
The version number needs to be "9". Of course, this is gazebo11. What to do? Just change the following to 11. The compatibility between gazebo versions is still very good.
The installation instructions have been given in detail in the official documents, please read them carefully. It has been greatly improved from the previous ROS1 and is more concise and convenient.
Linux and Windows links are as follows:
Win10:http://wiki.ros.org/Installation/Windows
ubuntu:http://wiki.ros.org/noetic/Installation/Ubuntu
debian:http://wiki.ros.org/noetic/Installation/Debian
Arch:http://wiki.ros.org/noetic/Installation/ArchLinux
The following is machine translation
[ World ROS Turtle Festival] (https://en.wikipedia.org/wiki/World_Turtle_Day) Happy ! Open Robotics is very honored to announce that the 13th ROS 1 release, Noetic Ninjemys, is now available!
How to get ROS Noetic?
Please follow the instructions for the platform on ROS Wiki on the installation page.
What's new in Noetic?
**First of all, Noetic is the only Officially support Python 3 ROS 1 version! **
For major changes, please refer to "Noetic Migration Guide" and the change log of each package to understand what new features they have.
What is Noetic?
This initial release of Noetic contains 369 packages, and the current 2709 in ROS Kinetic is compared with 1939 in ROS Melodic.
navigation and ros_control have been released to Noetic, and MoveIt! has not been released yet.
Please refer to Noetic page on index.ros.org or buildfarm Noetic status page, to check if the software package used is available.
**In addition, Ubuntu Focal provides a 32-bit ARM (armhf) software package, and Ubuntu Focal and Debian Buster provide up to a 64-bit ARM (aarch64) software package ros-noetic-desktop. **
What if the package I need is not available?
This is only the initial version!
The bag can be added to ROS Noetic until the end of life.
This is a long-term support (LTS) version, which means it will be supported until May 2025. **
If the package you want to publish is missing, please first check if it can be published, and then contact the maintainer by opening the issue in the source repository. If this doesn't work, you can put it in ROS utterance release category.
Written at the end#
Thanks to all the maintainers and contributors who helped implement this version.
We cannot do this without you.
ROS team