Getting started learning SLAM (Ubuntu16.04 install ROS kinetic)
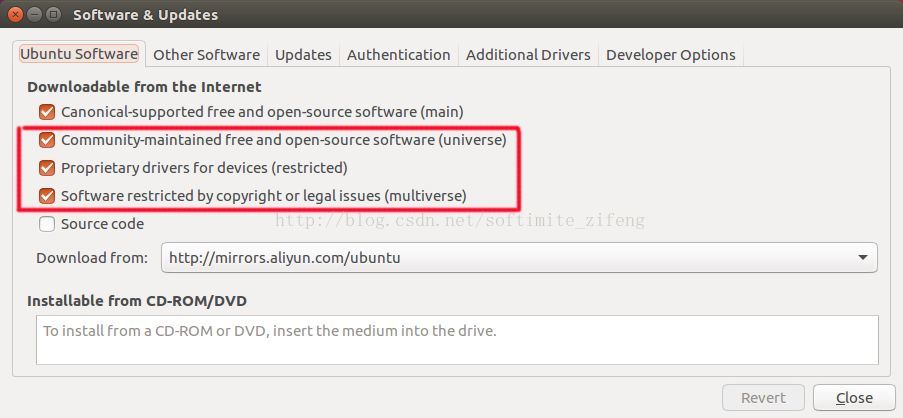
- Configure Ubuntu's resource library:
" Restricted", "universe" and "multiverse". Generally, there is no need to configure, please refer to the red box in the figure below.
If there is no configuration, you can refer to the official Ubuntu website: click to open the link
- Set Ubuntu's sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu
$(lsb_release -sc) main" >/etc/apt/sources.list.d/ros-latest.list'
- Set key
sudo apt-key adv --keyserver hkp:
If you cannot connect to the above server, you can try hkp://pgp.mit.edu:80 or hkp://keyserver.ubuntu.com:80
- Update package
sudo apt-get update
- Install the full version of ROS kinetic
sudo apt-get install ros-kinetic-desktop-full
After installation, you can view the available packages:
apt-cache search ros-kinetic
-
Initialize rosdep
You must initialize rosdep before using ROS -
Configuration Environment
echo "source /opt/ros/kinetic/setup.bash">>~/.bashrc
- Install building package dependencies
sudo apt-get install python-rosinstall python-rosinstall-generator
python-wstool build-essential
- Test ROS installation is successful
- Open Termial and enter the following command to initialize the ROS environment:
roscore
- Open a new Termial, enter the following command, a little turtle window pops up:
rosrun turtlesim turtlesim_node
- Open the new Termial, enter the following command, you can use the arrow keys to control the movement of the turtle in Termial:
rosrun turtlesim turtle_teleop_key
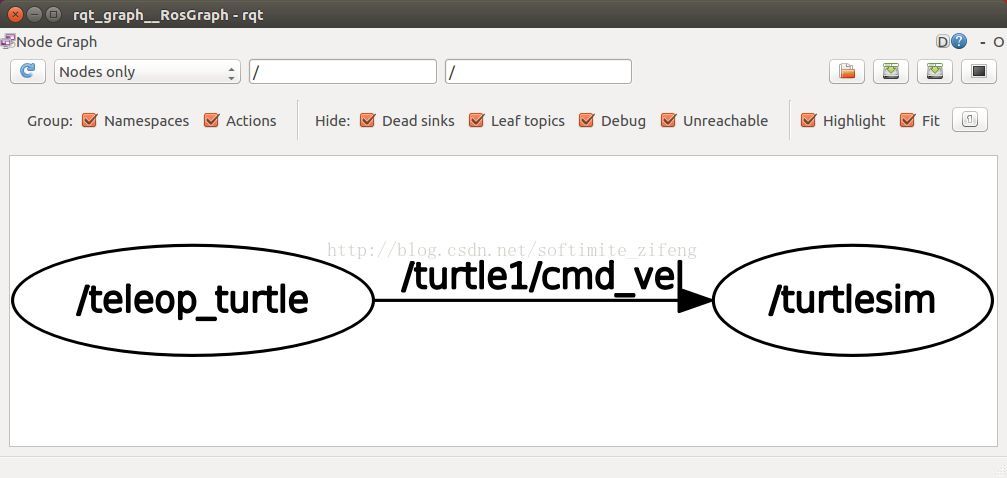
- Open a new Termial, enter the following command, a new window will pop up to view the ROS node information:
rosrun rqt_graph rqt_graph
Reference blog link:
https://blog.csdn.net/softimite_zifeng/article/details/78632211
ROS kinetic official website:
http://wiki.ros.org/kinetic/Installation/Ubuntu
Recommended Posts