51MCUプログラムの開発とUbuntuでのダウンロード
今学期は51のシングルチップマイクロコンピュータコースがあります。コードをデバッグするためのウィンドウは必要ありません。いくつかの情報を確認しましたが、あまり役に立ちません。次に、ubuntu(Linux汎用)での51のシングルチップマイクロコンピュータの開発とダウンロードについて説明します。** SDCC **と*を使用する必要があります。 * stcgal **。
一般的なLinuxでテスト済みで、Ubuntu 16.04、18.04.20.04を使用できます。
リソースのダウンロード: [https://download.csdn.net/download/ZhangRelay/12820423](https://download.csdn.net/download/ZhangRelay/12820423)
SDCCとは何ですか?
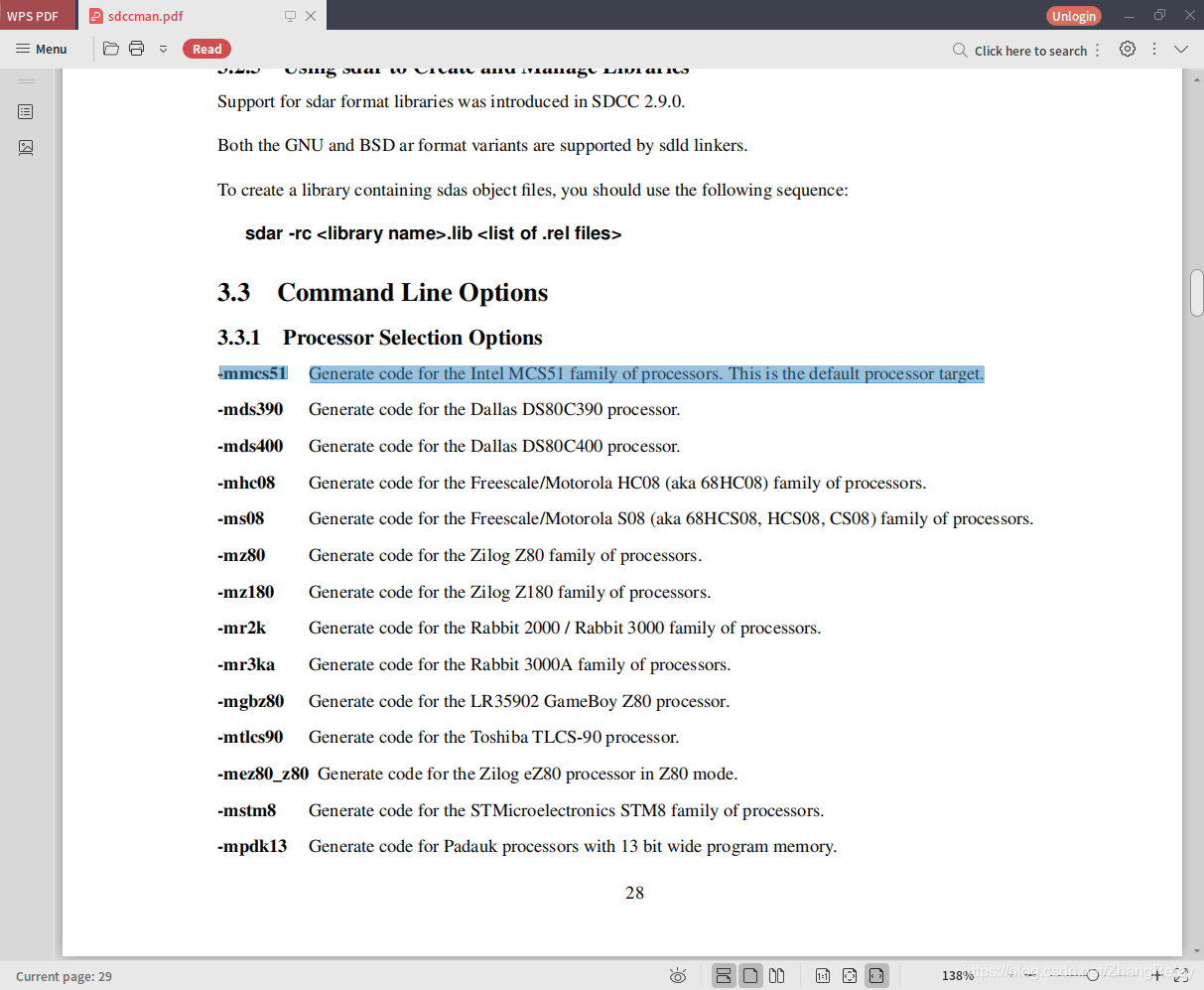
SDCC は、リターゲット可能で最適化された標準C(ANSI C89、ISO C99、ISO C11)コンパイラスイートであり、 Intel MCS51 マイクロプロセッサに基づくことを目的としています。 (8031、8032、8051、8052など)、マキシム(以前はダラス**)、*** DS80C390 *、フリースケール (以前は Motorola に基づいていました) HC08(hc08、s08)に基づいており、MCUは Zilog Z80 (z80、z180、gbz80、Rabbit 2000に基づいています) / 3000、Rabbit 3000A、TLCS-90)、 Padauk(pdk14、pdk15)および STMicroelectronics STM8 。 *** Padauk(pdk13)、 Microchip PIC16 および PIC18 ***ターゲットをサポートするための作業が進行中です。他のマイクロプロセッサに再配置できます。
SDCCスイートは、さまざまなFOSSライセンスを持つさまざまなソースから派生したいくつかのコンポーネントのコレクションです。 SDCCコンパイラキットには次のものが含まれます。
- **SDAS および sdld 、Alan Baldwin;(GPL)によって作成された ASXXXX **に基づくリターゲット可能なアセンブラーおよび接続。
- **sdcpp プリプロセッサ、 GCC cpp **;(GPL)に基づく。
- **ucsim *** Simulator *、元々はDaniel Drotosによって書かれました;(GPL)。
- **sdcdb **ソースコードレベルのデバッガー。元々はSandeepDuttaによって作成されました;(GPL)。
- **sdbinutils **ライブラリアーカイブユーティリティ(GNU Binutilsから派生したsdar、sdranlib、sdnmを含む);(GPL)
- SDCCランタイムライブラリ;(GPL + LE)。 Picデバイスライブラリとヘッダーファイルは、Microchipヘッダーファイル(.inc)とリンカースクリプト(.lkr)ファイルから取得されます。 Microchipは、「ヘッダーファイルには、信頼できるMicrochipデバイスでのみ使用できることを記載する必要がある」ことを要求しているため、GPLとの互換性がありません。
- **gcc-test 回帰テスト、 gcc-testsuite **から派生;(ライセンスは明示的に指定されていませんが、GCCの一部であるため、GPLライセンスである可能性があります)
- **packihx **;(パブリックエリア)
- **makebin **;(zlib / libpngライセンス)
- *sdcc *** Cコンパイラ、元々はSandeep Duttaによって書かれました;(GPL)。いくつかの機能が含まれます:
- 広範なMCU固有の言語拡張機能は、基本的なハードウェアを効果的に利用できます。
- グローバル部分式の削除、ループの最適化(ループ不変、誘導変数の強度の削減、ループの反転)、一定の折りたたみおよび*伝播、コピーの伝播、デッドコードの除去、「スイッチ」ステートメントなどの一連の標準的な最適化ジャンプテーブル。 *
- グローバルレジスタアロケータを含むMCU固有の最適化。
- MCUのアダプティブバックエンドに適しており、他の8ビットMCUにも非常に適している必要があります
- 独立したルールに基づくのぞき穴オプティマイザー。
- 完全なデータタイプの範囲:** char ( 8 * bit、1バイト)、* short ( 16 * bit、2バイト)、* int ( 16 * bit、2バイト)、* long ( 32 ビット、4バイト)、 long long ( 64 ビット、8バイト)、浮動小数点数(IEEE4バイト) )および _ Bool ** / ** bool **。
- 関数内の任意の場所にインラインアセンブリコードを追加する機能。
- アセンブラーで何を書き直す必要があるかを判断するのに役立つ関数の複雑さを報告する機能。
- 自動回帰テストに適しています。
**SDCC は元々SandeepDuttaによって作成され、 GPL **ライセンスの下でリリースされました。最初のリリース以来、多くのバグ修正と改善が行われました。 1999年12月以降、コードはSourceForgeに移動され、すべての「ユーザーが開発者になる」ことが同じソースツリーにアクセスできるようになりました。 SDCCは、すべてのユーザーと開発者の入力を継続的に更新します。
インストール###
簡単に紹介します。
sdcc圧縮ファイルを解凍し(ここでは最新バージョン4.0.0が使用されます)、すべてのドキュメントは** sdcc-4.0.0 / share / sdcc / doc **にあります。
cd sdcc-4.0.0
cp -r * /usr/local
コンパイル###
sdcc -mmcs51 xxx.c
最も簡単なインストール方法:
sudo apt install sdcc
stcgal-STC MCUISPフラッシュツール##
stcgalは、[STC MCU Ltd](http://stcmcu.com/)のコマンドラインフラッシュプログラミングツールです。 8051互換のマイクロプロセッサ。
STCマイクロプロセッサにはUART / USBベースのブートローダー(BSL)があります。パケットベースのプロトコルを使用して、シリアルリンクを介してコードメモリとIAPメモリを更新します。これは、インシステムプログラミング(ISP)と呼ばれます。 BSLは、さまざまな(ヒューズのような)機器オプションを構成するためにも使用されます。残念ながら、この合意は公に文書化されておらず、STCはプログラミング用の(大まかに)WindowsGUIアプリケーションのみを提供します。
**stcgalは、STCのWindowsソフトウェアに代わるフル機能のオープンソースです。複数のMCUをサポートし、非常にポータブルで、自動化に適しています。 ****
特徴###
- STC89 / 90/10/11/12/15/8シリーズをサポート
- UARTおよびUSBBSLのサポート
- 部品情報を表示する
- 作業頻度を決定する
- プログラムフラッシュ
- IAP / EEPROMをプログラムする
- デバイスオプションを設定する
- 一意のデバイスIDを読み取る(STC 10/11/12/15/8)
- RC発振器周波数をトリムします(STC 15/8)
- DTRスイッチキーまたはカスタムシェルコマンドを使用して、電源を自動的に再起動します
- 自動UARTプロトコル検出
クイックスタート ###
stcgalをインストールします(root /管理者権限が必要な場合があります):
pip3 install stcgal
Collecting stcgal
Downloading https://files.pythonhosted.org/packages/b0/68/4924bd584b9e47639b28a1900cbced4e90deac7905fd996108ee2fcf975c/stcgal-1.6-py3-none-any.whl
Collecting tqdm>=4.0.0(from stcgal)
Downloading https://files.pythonhosted.org/packages/28/7e/281edb5bc3274dfb894d90f4dbacfceaca381c2435ec6187a2c6f329aed7/tqdm-4.48.2-py2.py3-none-any.whl(68kB)100%|████████████████████████████████| 71kB 754kB/s
Collecting pyserial>=3.0(from stcgal)
Using cached https://files.pythonhosted.org/packages/0d/e4/2a744dd9e3be04a0c0907414e2a01a7c88bb3915cbe3c8cc06e209f59c30/pyserial-3.4-py2.py3-none-any.whl
Installing collected packages: tqdm, pyserial, stcgal
Successfully installed pyserial-3.4 stcgal-1.6 tqdm-4.48.2
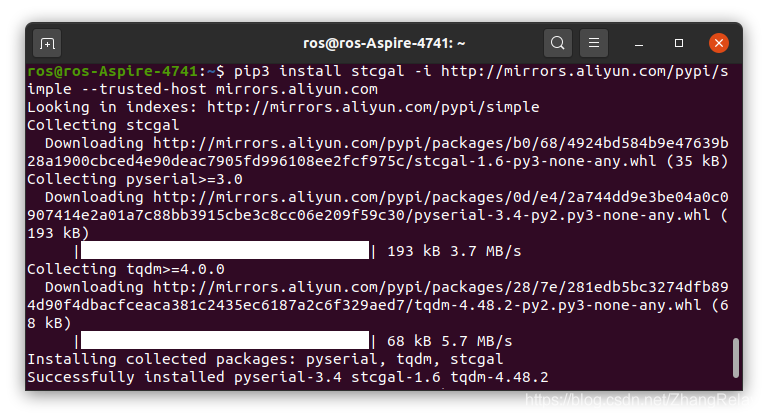
ネットワークに問題がある場合は、次のコマンドを試してください。
pip3 install stcgal -i http://mirrors.aliyun.com/pypi/simple --trusted-host mirrors.aliyun.com
stcgalを呼び出し、使用法を表示します。
stcgal -h
usage: stcgal [-h][-a][-r RESETCMD][-P {stc89,stc12a,stc12b,stc12,stc15a,stc15,stc8,usb15,auto}][-p PORT][-b BAUD][-l HANDSHAKE][-o OPTION][-t TRIM][-D][-V][code_image][eeprom_image]
stcgal 1.6- an STC MCU ISP flash tool(C)2014-2018 Grigori Goronzy and others
https://github.com/grigorig/stcgal
positional arguments:
code_image code segment file to flash(BIN/HEX)
eeprom_image eeprom segment file to flash(BIN/HEX)
optional arguments:-h,--help show this help message and exit
- a,--autoreset cycle power automatically by asserting DTR
- r RESETCMD,--resetcmd RESETCMD
shell command for board power-cycling(instead of DTR
assertion)-P {stc89,stc12a,stc12b,stc12,stc15a,stc15,stc8,usb15,auto},--protocol {stc89,stc12a,stc12b,stc12,stc15a,stc15,stc8,usb15,auto}
protocol version(default: auto)-p PORT,--port PORT serial port device
- b BAUD,--baud BAUD transfer baud rate(default:19200)-l HANDSHAKE,--handshake HANDSHAKE
handshake baud rate(default:2400)-o OPTION,--option OPTION
setoption(can be used multiple times, see
documentation)-t TRIM,--trim TRIM RC oscillator frequency inkHz(STC15+ series only)-D,--debug enable debug output
- V,--version print version info and exit
stcgal -P stc89 xxx.ihx
プログラムを変更する必要があります。例としてLEDライトを取り上げます。
# include <reg52.h>//52シリーズMCUヘッダーファイル
sbit LSA = P1^5;//LEDビット選択デコードアドレスピンA
sbit LSB = P1^6;//LEDビット選択デコードアドレスピンB
sbit LSC = P1^7;//LEDビット選択デコードアドレスピンC
int main(void){while(1)//メインプログラムには無限ループプログラムが設定されており、繰り返し動作します。{//LEDライトのメインスイッチングトランジスタQ6をオンにします。+LEDライトグループに5Vを追加
LSA =0;
LSB =0;
LSC =0;
P0 =0xfe;//発光ダイオードを点灯する}}
次のように変更する必要があります。
# include <8052.h>
# define LSA P1_5
# define LSB P1_6
# define LSC P1_7
int main(void){while(1){
LSA =0;
LSB =0;
LSC =0;
P0 =0xfe;}}
Linuxでドライバーをインストールする必要はありません! ! !
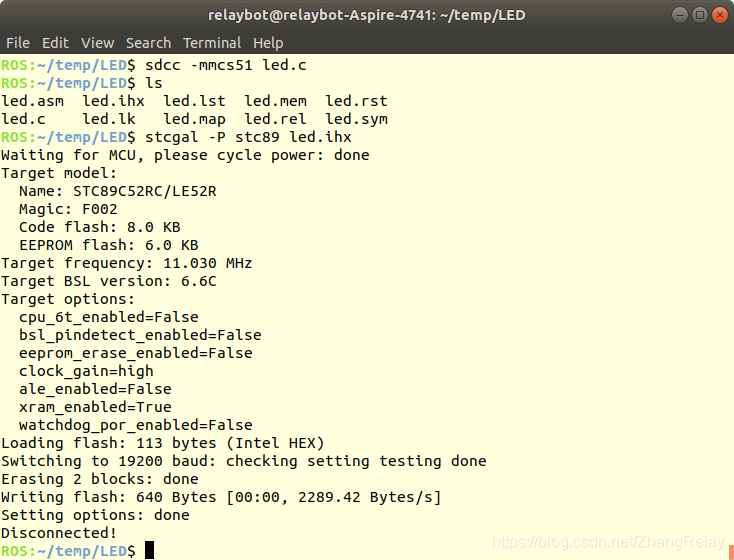
sdcc -mmcs51 led.c
stcgal -P stc89 led.ihx
点滅:
# include <8052.h>
# define LSA P1_5 //LEDビット選択デコードアドレスピンA
# define LSB P1_6 //LEDビット選択デコードアドレスピンB
# define LSC P1_7 //LEDビット選択デコードアドレスピンC
# define Led10 P0_7 //P0を定義する.7名前はled10
int main(void){
unsigned int a;//符号なし整数変数をしばらく定義します(1){//LEDライトのメインスイッチングトランジスタQ6をオンにします。+LEDライトグループに5Vを追加
LSA =0;
LSB =0;
LSC =0;
Led10 =0;//LED10を点灯
a =50000;while(a--);//50000サイクル、遅延の目的を達成するために時間が消費されます
Led10 =1;;//LED10をオフにします
a =50000;while(a--);//ディレイ}}
呼吸光:
# include <8052.h>
# define LSA P1_5 //LEDビット選択デコードアドレスピンA
# define LSB P1_6 //LEDビット選択デコードアドレスピンB
# define LSC P1_7 //LEDビット選択デコードアドレスピンC
# define Led10 P0_7 //P0を定義する.7名前はled10
int atime=64;voiddelay(unsigned int pms)//遅延機能{
unsigned int x;
unsigned int y;for(x=pms;x>0;x--)for(y=11;y>0;y--);}voidledfade(unsigned int i)//呼吸光{
Led10 =0;delay(i);
Led10 =1;delay(atime-i);}
int main(void){
int a;//符号なし整数変数をしばらく定義します(1){//LEDライトのメインスイッチングトランジスタQ6をオンにします。+LEDライトグループに5Vを追加
LSA =0;
LSB =0;
LSC =0;for(a=0;a<atime;a++){ledfade(a);}for(a=atime;a>0;a--){ledfade(a);}}}
呼吸マーキー? ? ? (改善と最適化が必要です!)
# include <8052.h>
# define LSA P1_5 //LEDビット選択デコードアドレスピンA
# define LSB P1_6 //LEDビット選択デコードアドレスピンB
# define LSC P1_7 //LEDビット選択デコードアドレスピンC
# define Led10 P0_0 //P0を定義する.0名前はled10
# define Led11 P0_1 //P0を定義する.0名前はled11
# define Led12 P0_2 //P0を定義する.0名前はled12
# define Led13 P0_3 //P0を定義する.0名前はled13
# define Led14 P0_4 //P0を定義する.0名前はled14
# define Led15 P0_5 //P0を定義する.0名前はled15
# define Led16 P0_6 //P0を定義する.0名前はled16です
# define Led17 P0_7 //P0を定義する.0名前はled17です
int atime=64;voiddelay(unsigned int pms)//遅延機能{
unsigned int x;
unsigned int y;for(x=pms;x>0;x--)for(y=11;y>0;y--);}voidledfade0(unsigned int i)//呼吸光{
Led10 =0;delay(i);
Led10 =1;delay(atime-i);}voidledfade1(unsigned int i)//呼吸光{
Led11 =0;delay(i);
Led11 =1;delay(atime-i);}voidledfade2(unsigned int i)//呼吸光{
Led12 =0;delay(i);
Led12 =1;delay(atime-i);}voidledfade3(unsigned int i)//呼吸光{
Led13 =0;delay(i);
Led13 =1;delay(atime-i);}voidledfade4(unsigned int i)//呼吸光{
Led14 =0;delay(i);
Led14 =1;delay(atime-i);}voidledfade5(unsigned int i)//呼吸光{
Led15 =0;delay(i);
Led15 =1;delay(atime-i);}voidledfade6(unsigned int i)//呼吸光{
Led16 =0;delay(i);
Led16 =1;delay(atime-i);}voidledfade7(unsigned int i)//呼吸光{
Led17 =0;delay(i);
Led17 =1;delay(atime-i);}
int main(void){
int a;//符号なし整数変数をしばらく定義します(1){//LEDライトのメインスイッチングトランジスタQ6をオンにします。+LEDライトグループに5Vを追加
LSA =0;
LSB =0;
LSC =0;for(a=0;a<atime;a++){ledfade0(a);}for(a=atime;a>0;a--){ledfade0(a);}for(a=0;a<atime;a++){ledfade1(a);}for(a=atime;a>0;a--){ledfade1(a);}for(a=0;a<atime;a++){ledfade2(a);}for(a=atime;a>0;a--){ledfade2(a);}for(a=0;a<atime;a++){ledfade3(a);}for(a=atime;a>0;a--){ledfade3(a);}for(a=0;a<atime;a++){ledfade4(a);}for(a=atime;a>0;a--){ledfade4(a);}for(a=0;a<atime;a++){ledfade5(a);}for(a=atime;a>0;a--){ledfade5(a);}for(a=0;a<atime;a++){ledfade6(a);}for(a=atime;a>0;a--){ledfade6(a);}for(a=0;a<atime;a++){ledfade7(a);}for(a=atime;a>0;a--){ledfade7(a);}}}
51をロボットオペレーティングシステムROSに接続する必要がある場合は、以下を参照してください。
Recommended Posts