SLAMの学習を開始する(Ubuntu16.04インストールROSキネティック)
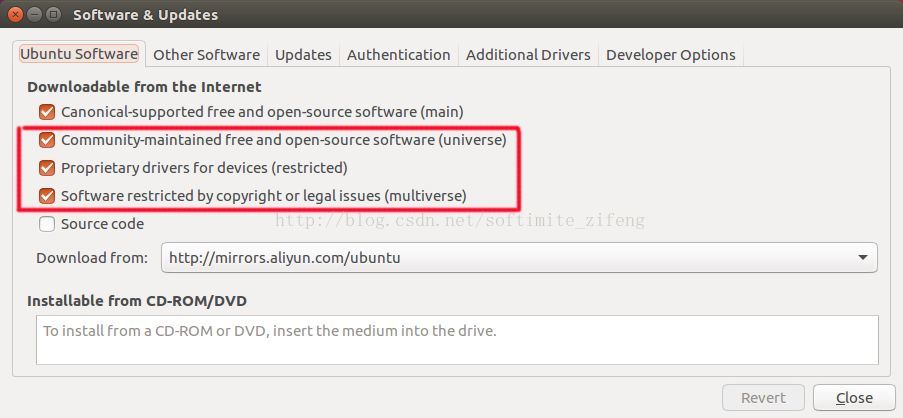
- Ubuntuのリソースライブラリを構成します。
" 「制限付き」、「ユニバース」、「マルチバース」。通常、設定する必要はありません。下図の赤いボックスを参照してください。
構成がない場合は、Ubuntuの公式Webサイトを参照できます。クリックしてリンクを開きます
- Ubuntuのsources.listを設定します
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu
$(lsb_release -sc) main" >/etc/apt/sources.list.d/ros-latest.list'
- セットキー
sudo apt-key adv --keyserver hkp:
上記のサーバーに接続できない場合は、hkp://pgp.mit.edu:80またはhkp://keyserver.ubuntu.com:80を試すことができます。
- パッケージの更新
sudo apt-get update
- ROSキネティックのフルバージョンをインストールします
sudo apt-get install ros-kinetic-desktop-full
インストール後、利用可能なパッケージを表示できます。
apt-cache search ros-kinetic
-
rosdepを初期化します
ROSを使用する前にrosdepを初期化する必要があります -
構成環境
echo "source /opt/ros/kinetic/setup.bash">>~/.bashrc
- ビルドパッケージの依存関係をインストールする
sudo apt-get install python-rosinstall python-rosinstall-generator
python-wstool build-essential
- テストROSのインストールが成功しました
- Termialを開き、次のコマンドを入力してROS環境を初期化します。
roscore
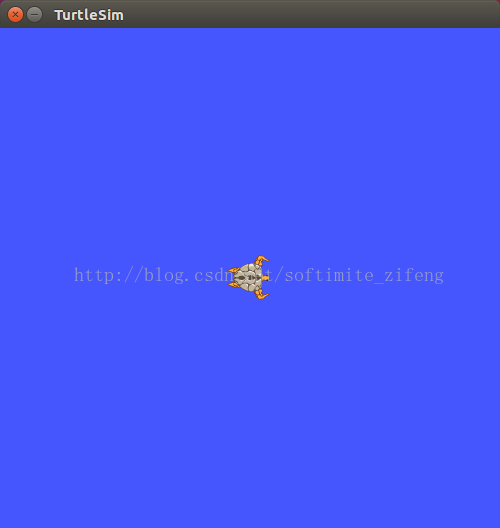
- 新しいTermialを開き、次のコマンドを入力すると、小さなタートルウィンドウがポップアップします。
rosrun turtlesim turtlesim_node
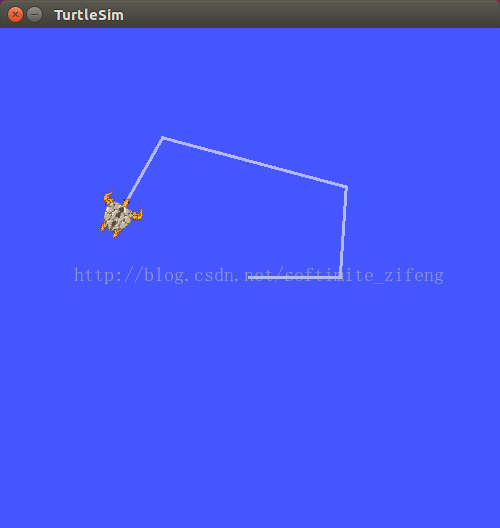
- 新しいTermialを開き、次のコマンドを入力します。矢印キーを使用して、Termialでのカメの動きを制御できます。
rosrun turtlesim turtle_teleop_key
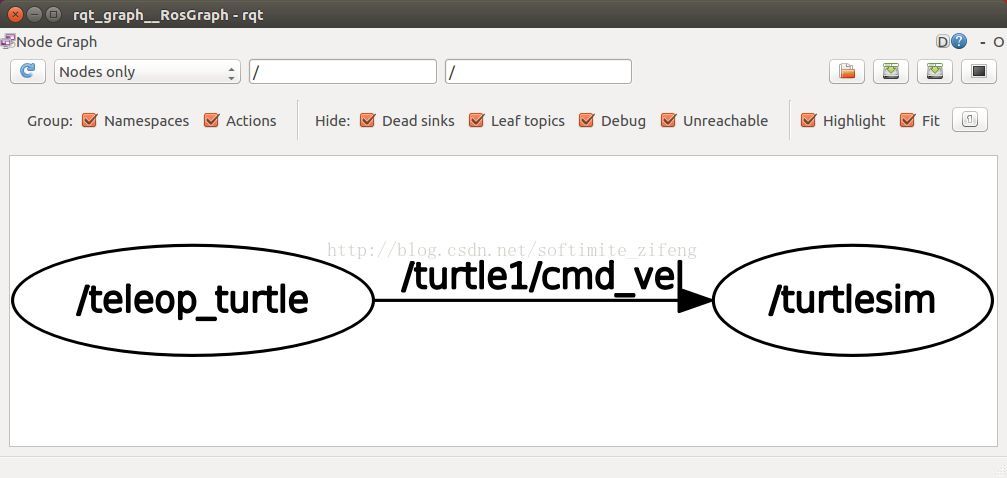
- 新しいTermialを開き、次のコマンドを入力すると、新しいウィンドウがポップアップしてROSノード情報が表示されます。
rosrun rqt_graph rqt_graph
参照ブログリンク:
https://blog.csdn.net/softimite_zifeng/article/details/78632211
ROSキネティック公式ウェブサイト:
http://wiki.ros.org/kinetic/Installation/Ubuntu
Recommended Posts