ROS 2 FoxyFitzroyがUbuntu20.04に適合
ROS2の新バージョンが間もなくリリースされます。ベータバージョンを今すぐ選択できます。使用する必要はありません。公式バージョンは、さまざまな基本機能パッケージに対応するために、少なくとも3〜6か月間リリースされます。古いバージョンのROS1のリリースの進行は、ROS2のリリースの進行よりも大幅に遅くなります。メロディックまたはキネティックを使用することをお勧めします。以前にROSに触れたことがない場合は、ROS1を学習しないでください。結局のところ、関連するテクノロジーとコード仕様はROS2とは大きく異なります。焦点はロボット関連のアプリケーションとアルゴリズムの研究にあるべきであり、ツールにあまり依存しないでください。

現在440のパッケージがあり、dashingの800+よりはるかに少ないです。
インストールは次のリンクを参照してください。
チュートリアルでは、ダッシュとフォクシーを完全に適応させます。
ソースを使用するには、ros2のベータ版をインストールします。
- deb http://packages.ros.org/ros2-testing/ubuntu focal main
ソースを使用するには、ros2の公式バージョンをインストールします。
- deb http://packages.ros.org/ros2/ubuntu focal main
チュートリアルについては、最初に直接の公式ドキュメントを参照してください。これはまもなく更新されます。
- source /opt/ros/foxy/setup.bash
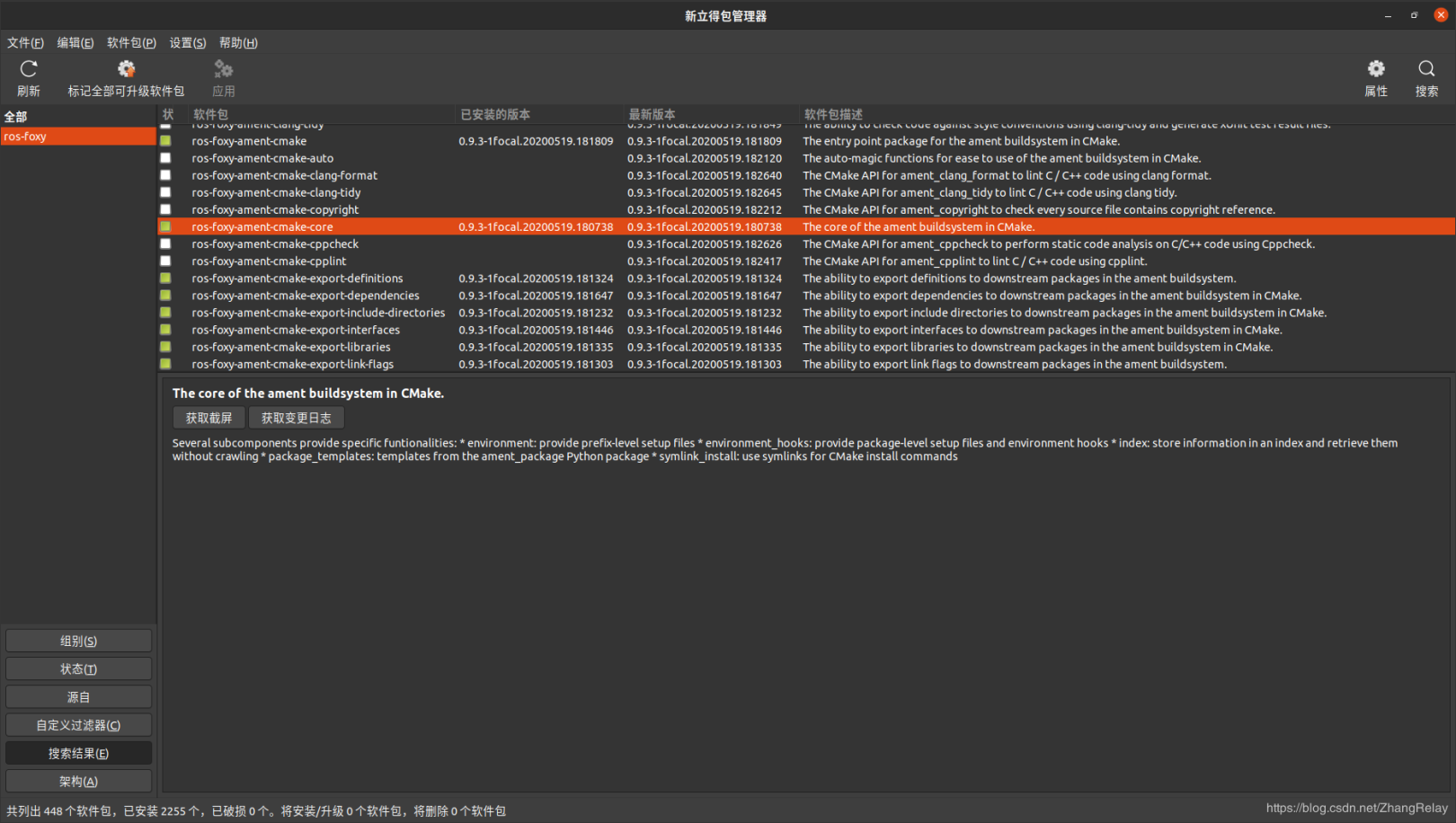
Synapticインストールキットの使用は、初心者に適しており、便利で迅速です。
ROS2ミラー使用ヘルプ##
新しい / etc / apt / sources.list.d / ros2-latest.listを作成します。内容は次のとおりです。
Debian / Ubuntuバージョン:Ubuntu 20.04 LTS
deb https://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu/ focal main
次に、次のコマンドを入力して、ROSのGPGキーを信頼し、インデックスを更新します。
sudo apt install curl gnupg2
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
sudo apt update
- cmake
- setuptools
Foxy Fitzroy(May 2020- May 2023)----------------------------------
Targeted platforms:+--------------+-----------------------+-------------------------+----------------------+--------------------+---------------+| Architecture | Ubuntu Focal(20.04)| MacOS Mojave(10.14)| Windows 10(VS2019)| Debian Buster(10)| OpenEmbedded /||||||| webOS OSE |+==============+=======================+=========================+======================+====================+===============+| amd64 | Tier 1[d][a][s]| Tier 1[a][s]| Tier 1[a][s]| Tier 3[s]||+--------------+-----------------------+-------------------------+----------------------+--------------------+---------------+| arm64 | Tier 1[d][a][s]||| Tier 3[s]| Tier 3[s]|+--------------+-----------------------+-------------------------+----------------------+--------------------+---------------+| arm32 | Tier 2[d][a][s]||| Tier 3[s]| Tier 3[s]|+--------------+-----------------------+-------------------------+----------------------+--------------------+---------------+
The following indicators show what delivery mechanisms are available for each platform." [d] " Debian packages will be provided forthis platform for packages submitted to the rosdistro." [a] " Binary releases are provided as a single archive per platform containing all packages in the Eloquent ROS 2 repos file [6]_." [s] " Compilation from source.
Middleware Implementation Support:+--------------------------+---------------------+---------------+-----------------------------+--------------------------------------+| Middleware Library | Middleware Provider | Support Level | Platforms | Architectures |+==========================+=====================+===============+=============================+======================================+| rmw_fastrtps_cpp | eProsima Fast-RTPS | Tier 1| All Platforms | All Architectures |+--------------------------+---------------------+---------------+-----------------------------+--------------------------------------+| rmw_connext_cpp | RTI Connext | Tier 1| All Platforms except Debian | All Architectures except arm64/arm32 ||||| and OpenEmbedded ||+--------------------------+---------------------+---------------+-----------------------------+--------------------------------------+| rmw_cyclonedds_cpp | Eclipse Cyclone DDS | Tier 1| All Platforms | All Architectures |+--------------------------+---------------------+---------------+-----------------------------+--------------------------------------+| rmw_fastrtps_dynamic_cpp | eProsima Fast-RTPS | Tier 2| All Platforms | All Architectures |+--------------------------+---------------------+---------------+-----------------------------+--------------------------------------+
Middleware implementation support is dependent upon the platform support tier.
For example a Tier 1 middleware implementation on a Tier 2 platform can only receive Tier 2 support.
Minimum language requirements:- C++14- Python 3.7
+- - - - - - - - - - - - - +- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - +- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - +|| Required Support | Recommended Support |+-------------+----------------+---------------+----------------+----------------+---------------------+| Package | Ubuntu Focal | MacOS**| Windows 10**| Debian Buster | OpenEmbedded**|+=============+================+===============+================+================+=====================+| CMake |3.16.3|3.14.4|3.14.4|3.13.4|3.16.1/3.12.2****|+-------------+----------------+---------------+----------------+----------------+---------------------+| EmPY |3.3.2|+-------------+----------------+---------------+----------------+----------------+---------------------+| Gazebo |11.0.0*|11.0.0| N/A |11.0.0*| N/A |+-------------+----------------+---------------+----------------+----------------+---------------------+| Ignition | Citadel*| N/A | Citadel*| N/A |+-------------+----------------+---------------+----------------+----------------+---------------------+| Ogre |1.10*| N/A |+-------------+----------------+---------------+----------------+----------------+---------------------+| OpenCV |4.2.0|4.2.0|3.4.6*|3.2.0|4.1.0/3.2.0****|+-------------+----------------+---------------+----------------+----------------+---------------------+| OpenSSL |1.1.1d |1.1.1f |1.1.1f |1.1.1d |1.1.1d /1.1.1b****|+-------------+----------------+---------------+----------------+----------------+---------------------+| Poco |1.9.2|1.9.0|1.8.0*|1.9.0|1.9.4|+-------------+----------------+---------------+----------------+----------------+---------------------+| Python |3.8.0|3.8.2|3.8.0|3.7.3|3.8.2/3.7.5****|+-------------+----------------+---------------+----------------+----------------+---------------------+| Qt |5.12.5|5.12.3|5.10.0|5.11.3|5.14.1/5.12.5****|+-------------+----------------+---------------+----------------+----------------+---------------------+||**Linux only**|+-------------+----------------+---------------+----------------+----------------+---------------------+| PCL |1.10.0| N/A | N/A |1.9.1|1.10.0|+-------------+----------------+---------------+----------------+----------------+---------------------+|**RMW DDS Milddleware Providers**|+-------------+----------------+---------------+----------------+----------------+---------------------+| Connext DDS |5.3.1| N/A |+-------------+----------------+---------------+----------------+----------------+---------------------+| Cyclone DDS |0.5.1(Eusebius)|+-------------+----------------+---------------+----------------+----------------+---------------------+| Fast-RTPS |1.10.0|+-------------+----------------+---------------+----------------+----------------+---------------------+" * " means that this is not the upstream version(available on the official Operating System repositories) but a package distributed by OSRF or the community(package built and distributed on custom repositories)." ** " Rolling distributions will see multiple version changes of these dependencies during their lifetime.
The versions shown for OpenEmbedded are those provided by the 3.1 Dunfell release series; the versions provided by the other supported release series are listed here: https://github.com/ros/meta-ros/wiki/Package-Version-Differences .
Note that the OpenEmbedded releases series for which a ROS distro has support will change during its support time frame,as per the OpenEmbedded support policy shown here: https://github.com/ros/meta-ros/wiki/Policies#openembedded-release-series-support .
However, it will always be supported by least one stable OpenEmbedded release series." \**** " webOS OSE provides this different version.
This document only captures the version at the first release of a ROS distribution and will not be updated as the dependencies move forward.
These versions are thus a low watermark.
Package manager use for dependencies:- Ubuntu, Debian: apt
- MacOS: Homebrew, pip
- Windows: Chocolatey, pip
- OpenEmbedded: opkg
Build System Support:- ament_cmake
- cmake
- setuptools
Recommended Posts