ubuntu14.0464Ros環境インストールhalcon13.01
**ROSシステムについては、以前にインストールされていました。ご不明な点がございましたら、公式ウェブサイトのインストールチュートリアルを参照し、手順を追って説明してください。http://wiki.ros.org/cn/indigo/Installation/Ubuntu ** ## #
(1) sources.listを追加
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
(2) キーを追加
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
(3) インストール
まず、Debianパッケージインデックスが最新であることを確認します。
sudo apt-get update
デスクトップのフルバージョンのインストール:(推奨)ROS、rqt、rviz、一般的なロボット機能ライブラリ、2D / 3Dシミュレーター、ナビゲーション、および2D / 3D認識機能が含まれています。
sudo apt-get install ros-indigo-desktop-full
**(4) rosdep **を初期化します###
また、ROSの使用を開始する前に、rosdepを初期化する必要があります。 rosdepは、ソースコードをコンパイルする必要があるときに、いくつかのシステム依存関係を簡単にインストールできます。また、rosdepは、一部のROSコア機能コンポーネントに必要なツールでもあります。
sudo rosdep initrosdep update
(5) 環境設定
新しい端末が開かれる(つまり、bashセッションに追加される)たびにROS環境変数を自動的に構成できる場合は、はるかに便利です。
echo "source /opt/ros/indigo/setup.bash">>~/.bashrcsource ~/.bashrc
通常の状況では、独自のROSワークスペースを作成します。環境変数を構成する必要があります。.bashrcファイルで構成します。たとえば、私のワークスペースはcatkinとして設定されています_ws次に、環境構成ファイルの最小の表面に2行が追加されました
source /opt/ros/indigo/setup.bash
source /home/(あなたのホスト名)/catkin_ws/devel/setup.bash
- 複数のROSバージョンがインストールされている場合、〜/ .bashrcは、現在使用しているバージョンに対応するsetup.bashのみを調達する必要があります。 *
現在の端末の環境変数のみを変更する場合は、次のコマンドを実行できます。
source /opt/ros/indigo/setup.bash
依存関係の問題など、プロセス中にさまざまな問題が発生する可能性があります。この問題の場合、通常、コマンドラインを直接使用します。sudoapt-getinstall lib(必要な依存関係の名前を入力する)-dev
ワークスペースの確立など、次の問題については詳しく説明しません。
次に、halconをインストールしましょう。インストールが完了したら、halconライブラリを使用してROSの例を記述します
(1)まず、halconの公式ウェブサイトhttp://www.mvtec.com/download/halconからソフトウェアをダウンロードします。もちろん、最初に登録し、インストールする必要のあるhalconのバージョンと、コンピューターシステムの環境を図に示すように選択します。
(64ビットシステムにしかインストールできないようです。)その後、「フルバージョンをダウンロード」をクリックしてフルバージョンをダウンロードすることができます。
、そしてインストールできますが、halconは商用ソフトウェアであることがわかっています。とにかくライセンスファイルが必要なので、最初に対応するクラックファイルを見つけます。これには少し時間がかかる場合があります。
通常、http://www.ihalcon.com/read.php?tid = 56で見つけることができます。通常、有効期間が1か月のクラックされたファイルを見つけて、それをインストールできます。
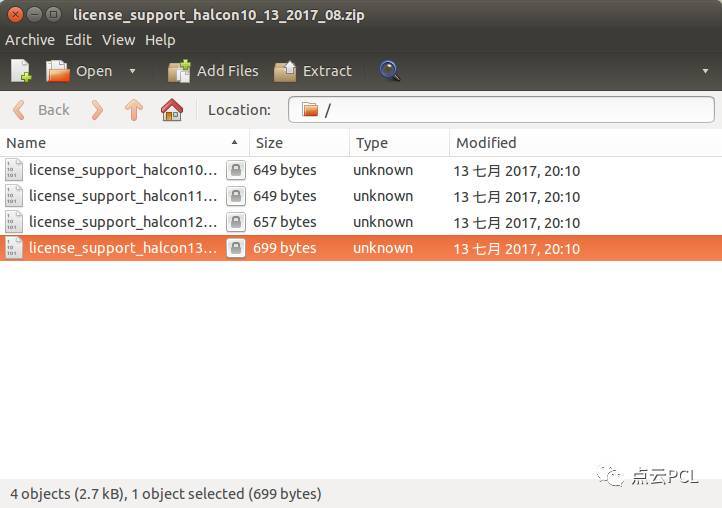
これらの2つの圧縮パッケージは、インストールされたソースファイルとクラックされたファイルです。
次に、最初にインストールファイルを解凍します
- halcon-13.0.1.1-linux.tar.gz->を右クリックして**
Extrac**を選択します。 - 圧縮されたパッケージが配置されているフォルダーの空白のターミナルに次のように入力します:tar zxvfhalcon-13.0.1.1-linux.tar.gzそれを抽出します
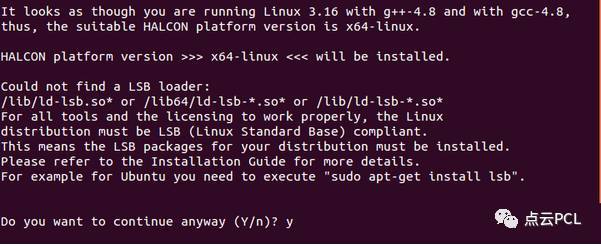
(2)解凍したファイルをインストールして入力し、インストールコマンドをインストールして実行できます。
sudo sh install-linux.sh
いくつかのプロンプトメッセージが表示されます。基本的にすべてのバージョンはこのようなものです。もちろん、続行するにはYを選択します。
ライセンス契約をお読みください。yを選択するとほとんどのソフトウェアが自動的に実行されますが、halconでは、ライセンスファイルを読み取るためにEnterキーを押し続ける必要があることに注意してください
もちろん、押し続けることはできません。プロンプトが表示されるまで押し続けます。押すと、もう一度やり直す必要があります。ハハハ、慈悲を示すことを忘れないでください。

次に、Yを選択した後の効果により、/ opt / halconの下の特定の場所にhalconをインストールするように求められます。

そうすると、個人的にはインストールパスを変更する必要がないと感じますが、やっぱり面倒なので直接入力してください

このファイルが存在しないことを確認するメッセージが表示されます。新しいファイルを作成する必要がありますか?もちろんyです
その後、インストールの種類などいくつかのオプションがあります。3つの完全なリファレンスの言語を選択してください英語です
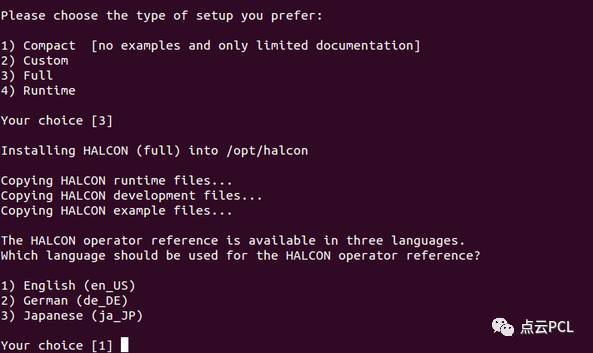
その後、インストールします。事故がなければ、正常にインストールされます。
次に、Ubuntu14.04の環境をセットアップする必要があります。Ubuntuでの環境変数の構成ファイルは.bashrcであることがわかっています。
したがって、コマンドを実行します
cd〜(ホームファイルに戻る)
sudo gedit ~/.bashrc
あなたはファイルを開くことができます
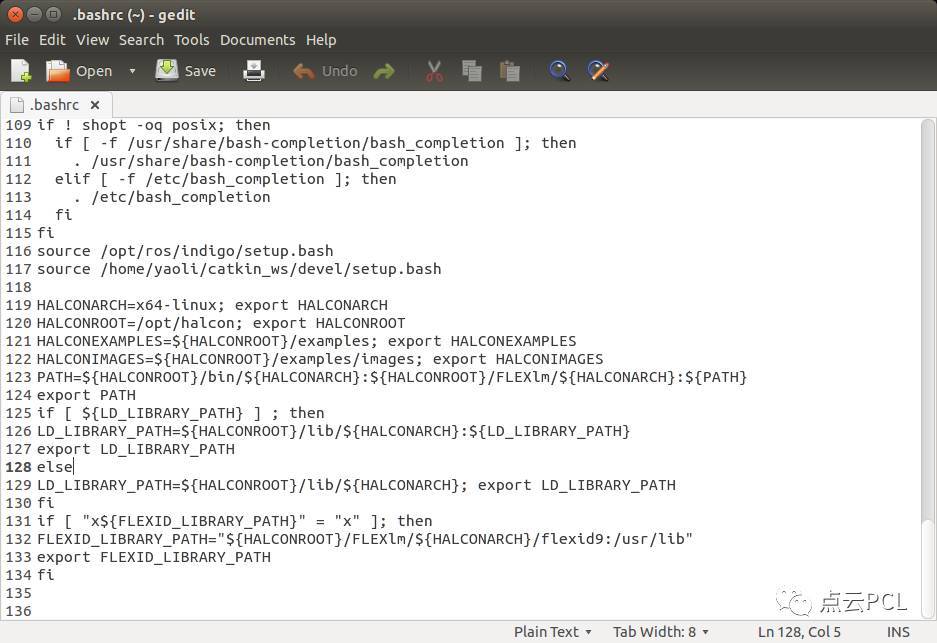
次に、ファイルの最後にhalconの環境変数設定を追加します
# Sample shell script for HALCON environment settings
# ( sh syntax)
# If you are using the Bourne shell source this file with the following
# command:
# source .profile_halcon
HALCONARCH=x64-linux;export HALCONARCH
HALCONROOT=/opt/halcon;export HALCONROOT
HALCONEXAMPLES=${HALCONROOT}/examples;export HALCONEXAMPLES
HALCONIMAGES=${HALCONROOT}/examples/images;export HALCONIMAGES
PATH=${HALCONROOT}/bin/${HALCONARCH}:${HALCONROOT}/FLEXlm/${HALCONARCH}:${PATH}export PATH
if[ ${LD_LIBRARY_PATH}]; then
LD_LIBRARY_PATH=${HALCONROOT}/lib/${HALCONARCH}:${LD_LIBRARY_PATH}export LD_LIBRARY_PATH
else
LD_LIBRARY_PATH=${HALCONROOT}/lib/${HALCONARCH};export LD_LIBRARY_PATH
fi
if["x${FLEXID_LIBRARY_PATH}"="x"]; then
FLEXID_LIBRARY_PATH="${HALCONROOT}/FLEXlm/${HALCONARCH}/flexid9:/usr/lib"export FLEXID_LIBRARY_PATH
fi
図に示すように、halcon環境変数が追加されたファイルのこのセクションをバックアップすることをお勧めします。これは、実際にはこのファイルの下に追加する必要がない場合があり、使用時に追加し、他のコンパイルを回避するために不要な場合は削除するためです。
他のファイルをコンパイルするときにエラーが発生したため、ファイルにエラーがありました。追加したコンテンツを削除するだけです。もちろん、halcon環境を使用する必要があります。これは間違いなく追加されています。
ファイルを保存した後、環境変数の設定を有効にするには、〜/ .bashrcをソースする必要があります
これで、halconソフトウェアのインストールに成功しましたが、ライセンスファイルがあり、非常に苦痛です。
ダウンロードしたファイルを解凍した後、このライセンスファイルlicense_support_halcon13_2017_08.datがバージョン13.01であることがわかりました。
ホームファイルに直接提案する
次に、このファイルを/ opt / halcon / licenseファイルに移動またはコピーします
通常はrootを取得する必要があるため、sudo cp(ライセンスファイル)/ opt / halcon / license /を使用します。
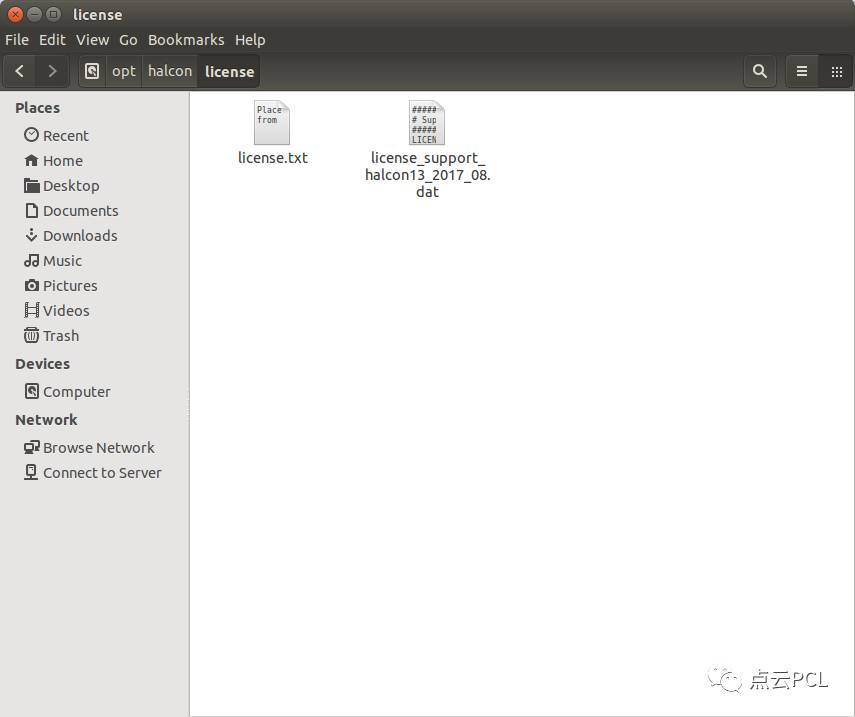
ライセンスファイルのアクセス許可を変更するsudochmod 777 /opt/halcon/license/license_support_halcon13_2017_08.dat
このようにして、Ubuntu環境へのhalconソフトウェアのインストールと端末入力が正常に完了しました。
hdevelop
エラーがあるというプロンプトメッセージのために他のファイルをコンパイルする場合、それは〜/ .bashrcファイルにhalcon環境エラーを追加したためです。
追加したドキュメントを削除する必要があります。削除した後、ターミナルにhdvelopと入力して、そのようなコマンドがないことを確認する場合があります。
/ opt / halcon / bin / x64_linux /に直接移動してhdvelopをダブルクリックして実行できるかどうかは関係ありません
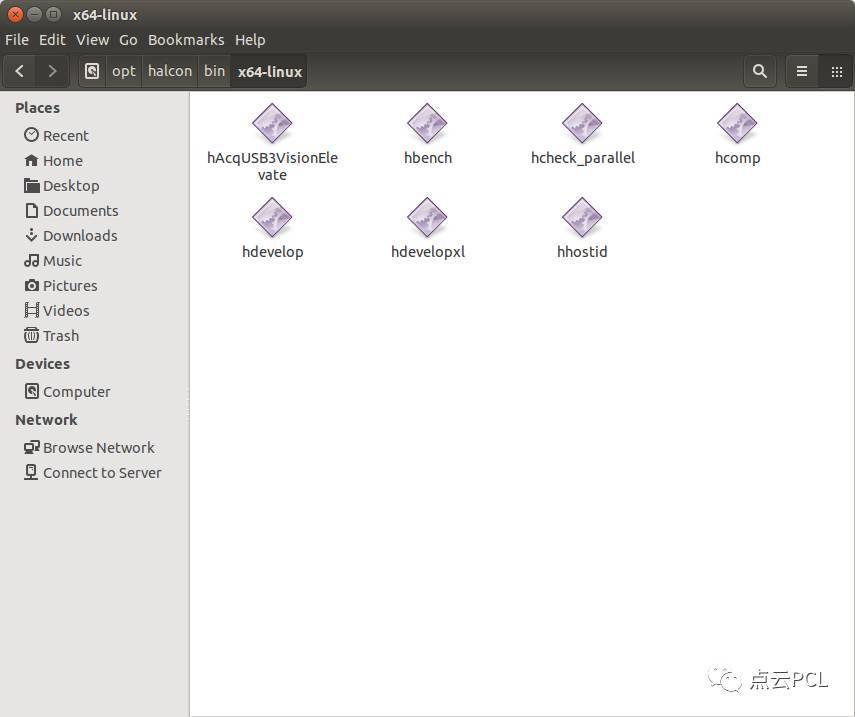
実行中のhdeveopインターフェイスは次のとおりです
ですから、実際、このソフトウェアを使うことはめったになく、初めてですが、例を開いて試すことができます。
find_surface_model.hdevファイルを開き、F5キーを押して、シングルステップ操作の効果を表示します
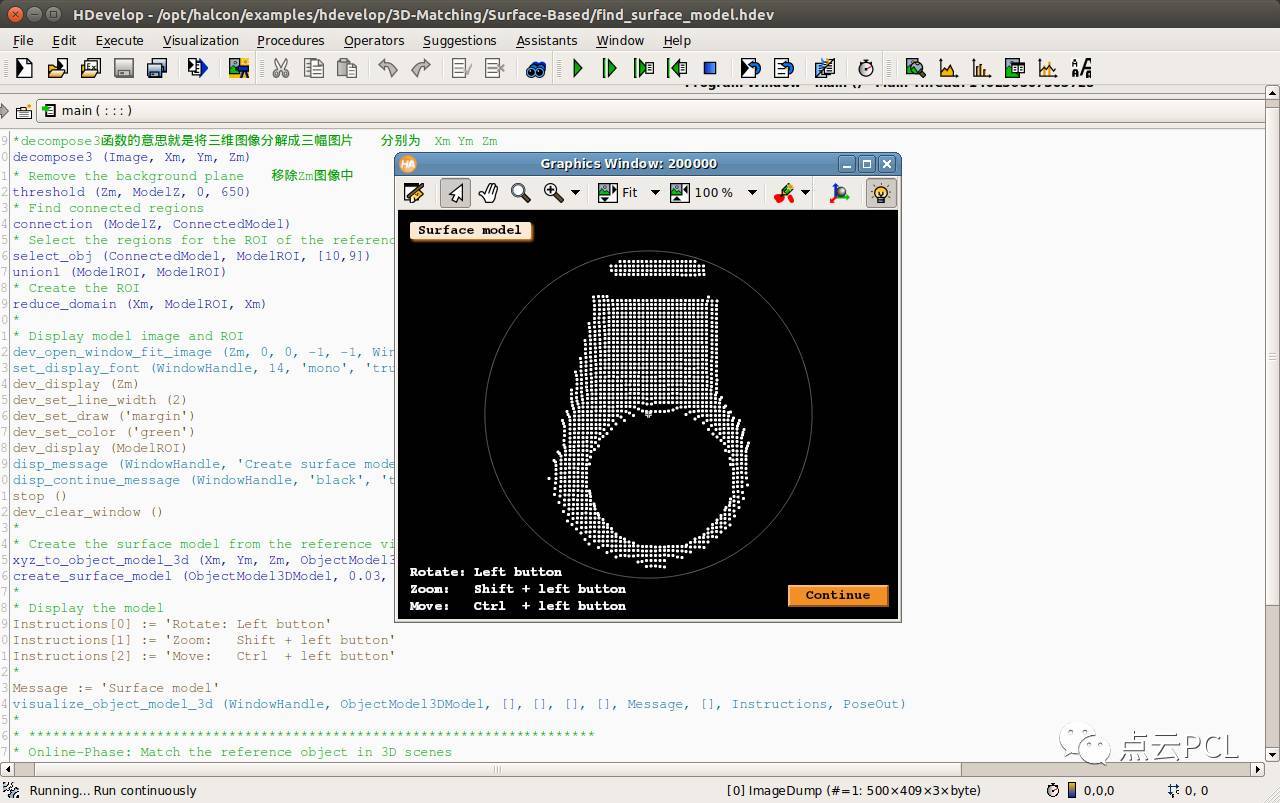
ハハさんは、インストールが成功したので、opencvよりもずっと涼しいハルコンをできるだけ楽しむことができると説明しました。産業用アプリケーションの例はたくさんあり、3次元処理の場合もたくさんあります。
次に、次の記事では、ROSオペレーティングシステムと組み合わせてhalconを呼び出して、写真を読んで表示する方法を説明します。
独自の実験と関連する研究を整理してください。積極的に貢献して共有したり、WeChat交換グループに参加して多くのポイントクラウド愛好家とコミュニケーションをとることができます。
Recommended Posts