ROS NoeticNinjemysがUbuntu20.04に出会う
ROS Noetic Ninjemysは、ROS1の最も画期的なバージョンです。どうして?
Synapticを使用したインストールプロセスはより簡潔です。
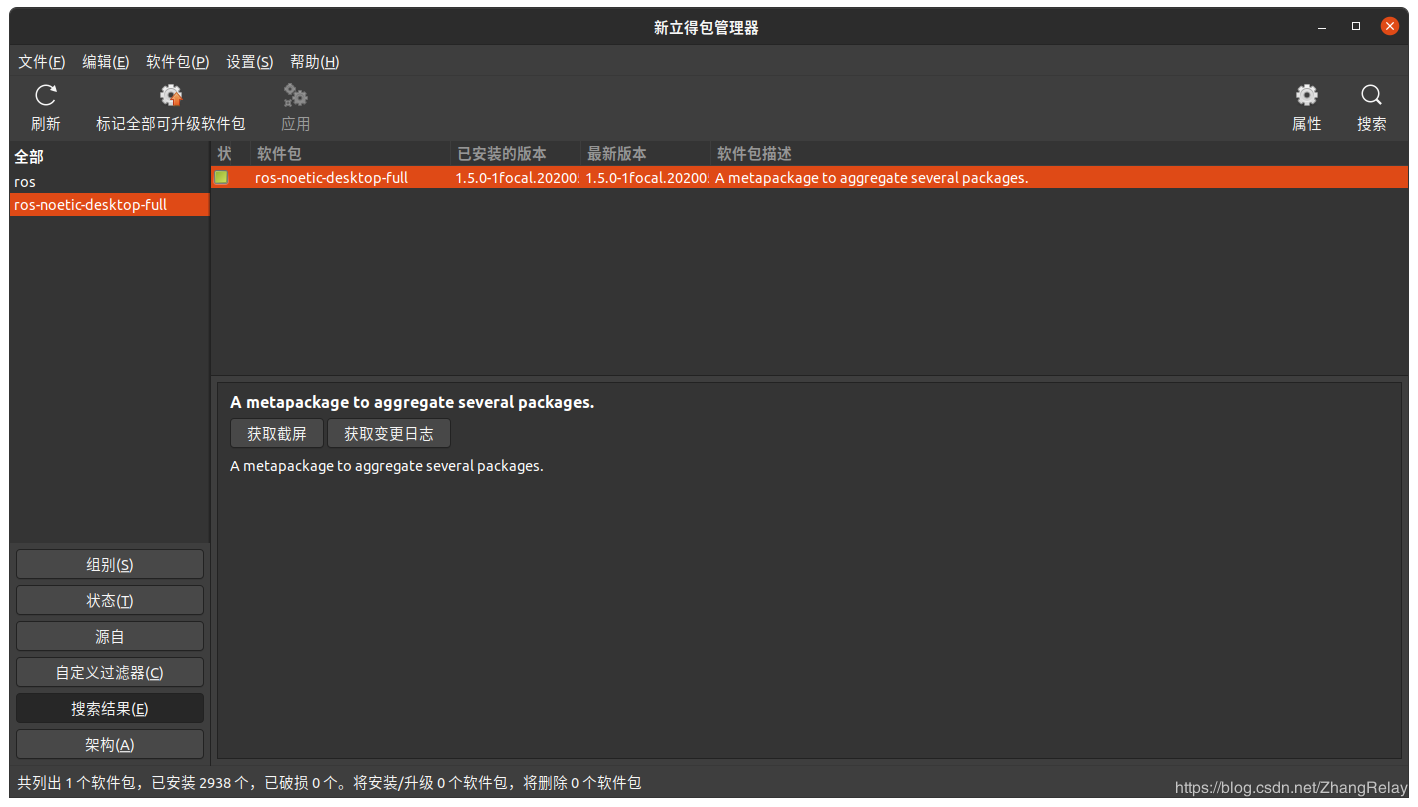
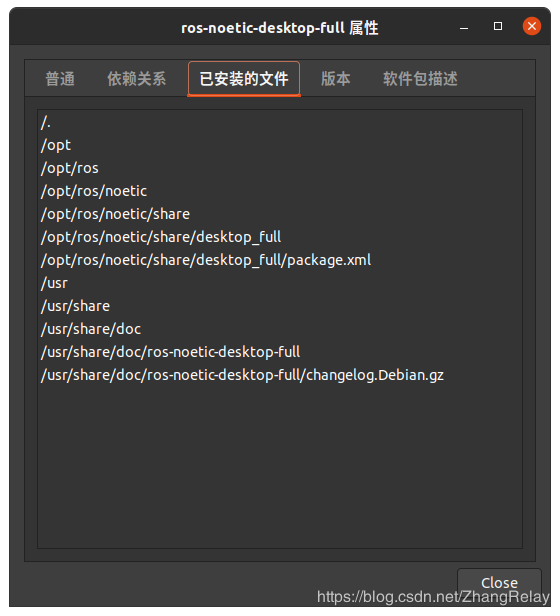
詳細なインストールディレクトリを上の図に示します。
ROS1NoeticとROS2Foxyは同時にインストールされます。次のコードを参照して、デフォルト環境を選択できます。
# ROS 1.0 noetic or ROS 2.0 foxy
echo Hello, ROS 1.0 or ROS 2.0?1=noetic 2=foxy
read ROS
if(($ROS==1));then
source /opt/ros/noetic/setup.bash
# export ROS_PACKAGE_PATH=/home/ros/RobTool/ROS1/Wiki/src:/home/relaybot/RobTool/Cozmo/ros/src:$ROS_PACKAGE_PATH
# source /home/ros/RobTool/ROS1/Wiki/devel/setup.bash
# export ROS_MASTER_URI=http://192.168.1.100:11311
# export ROS_IP=192.168.1.100
echo "noetic"elif(($ROS==2));then
source /opt/ros/foxy/setup.bash
echo "foxy"else
echo "Non-ROS"
fi
1を選択し、roscoreと入力します。
2を選択し、ros2と入力します。
- roslaunch gazebo_ros range_world.launch
この例では、仮想距離センサーの読み取りを示すことができます。
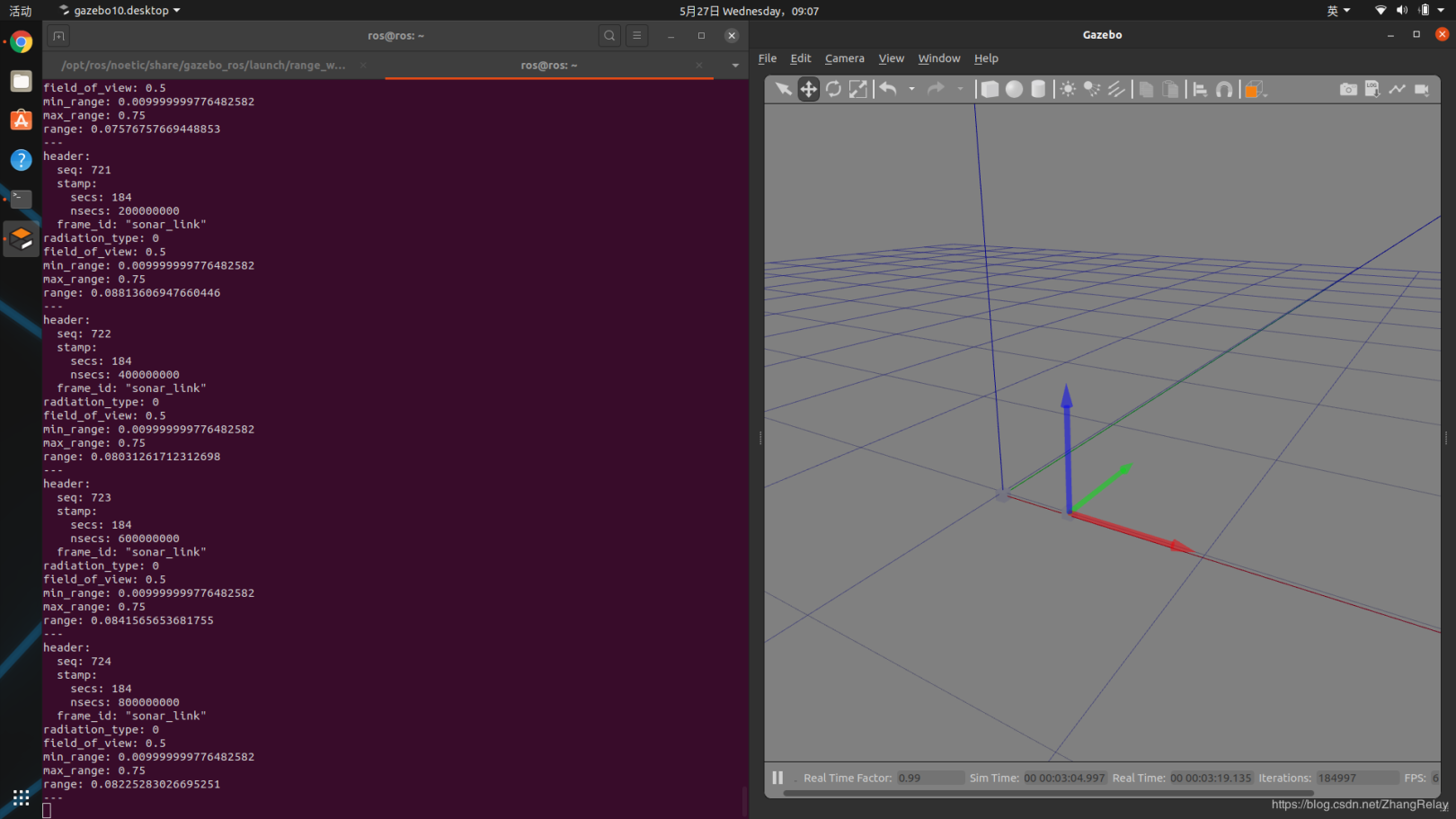
距離は0.08です
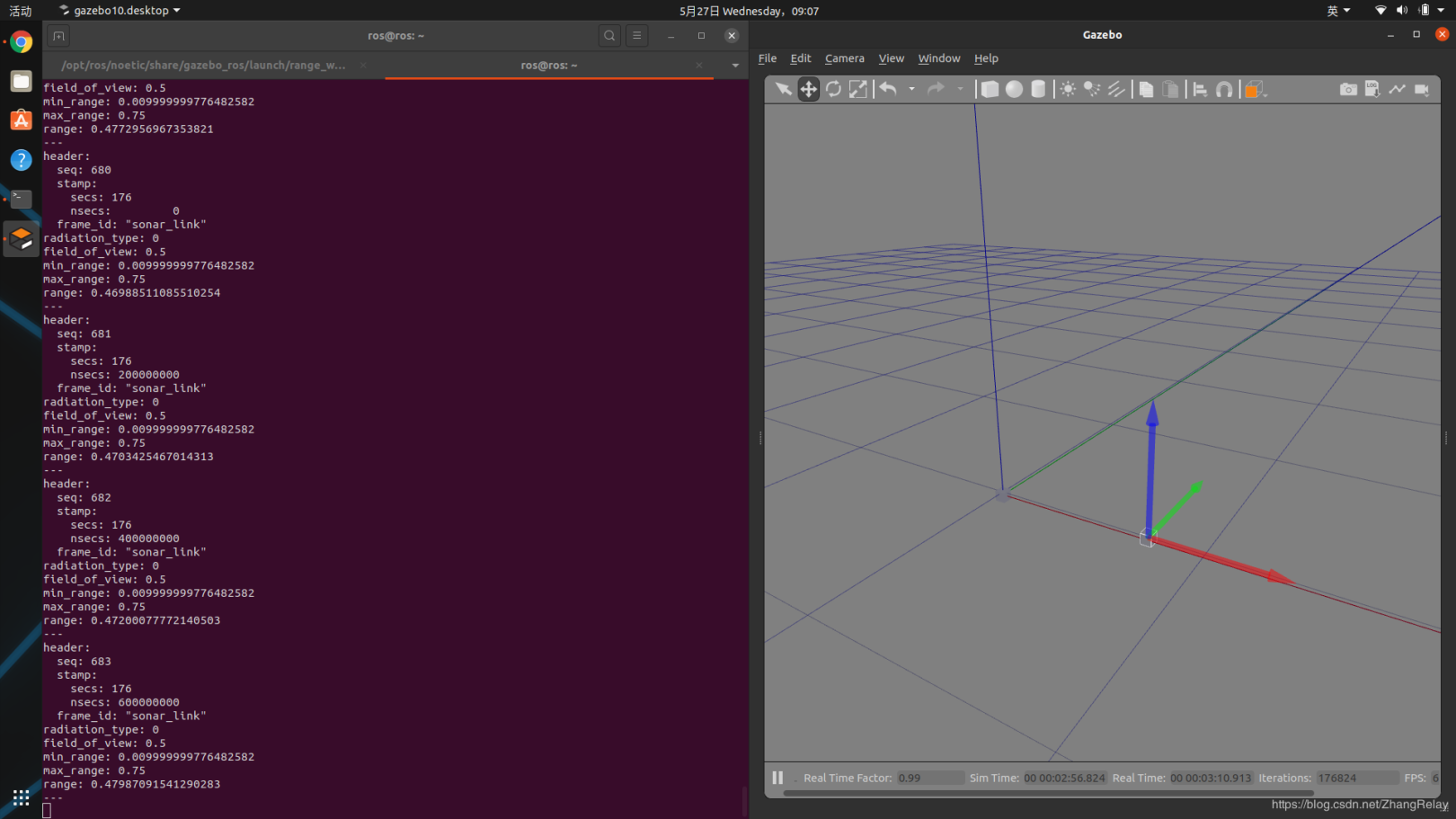
距離は0.48です
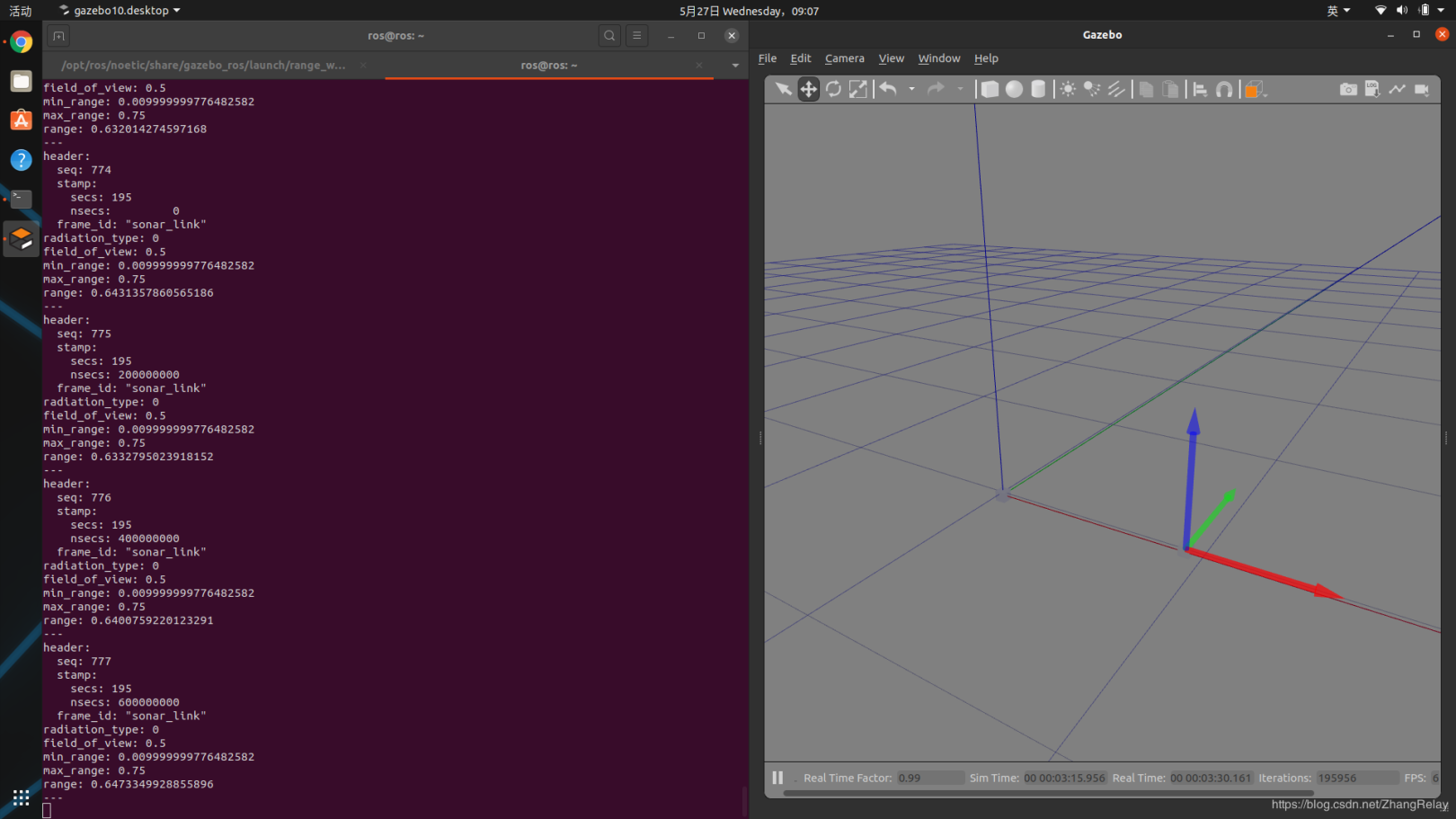
距離は0.65です
range_world.launch
<? xml version="1.0"?><launch><!-- these are the arguments you can pass this launch file,for example paused:=true--><arg name="paused"default="false"/><arg name="use_sim_time"default="true"/><arg name="extra_gazebo_args"default=""/><arg name="gui"default="true"/><arg name="debug"default="false"/><arg name="physics"default="ode"/><arg name="verbose"default="true"/><arg name="output"default="screen"/><arg name="world"default="gazebo_ros_range"/><include file="$(find gazebo_ros)/launch/empty_world.launch"><arg name="world_name" value="$(find gazebo_plugins)/test/test_worlds/$(arg world).world"/><arg name="paused" value="$(arg paused)"/><arg name="use_sim_time" value="$(arg use_sim_time)"/><arg name="extra_gazebo_args" value="$(arg extra_gazebo_args)"/><arg name="gui" value="$(arg gui)"/><arg name="debug" value="$(arg debug)"/><arg name="physics" value="$(arg physics)"/><arg name="verbose" value="$(arg verbose)"/><arg name="output" value="$(arg output)"/></include></launch>
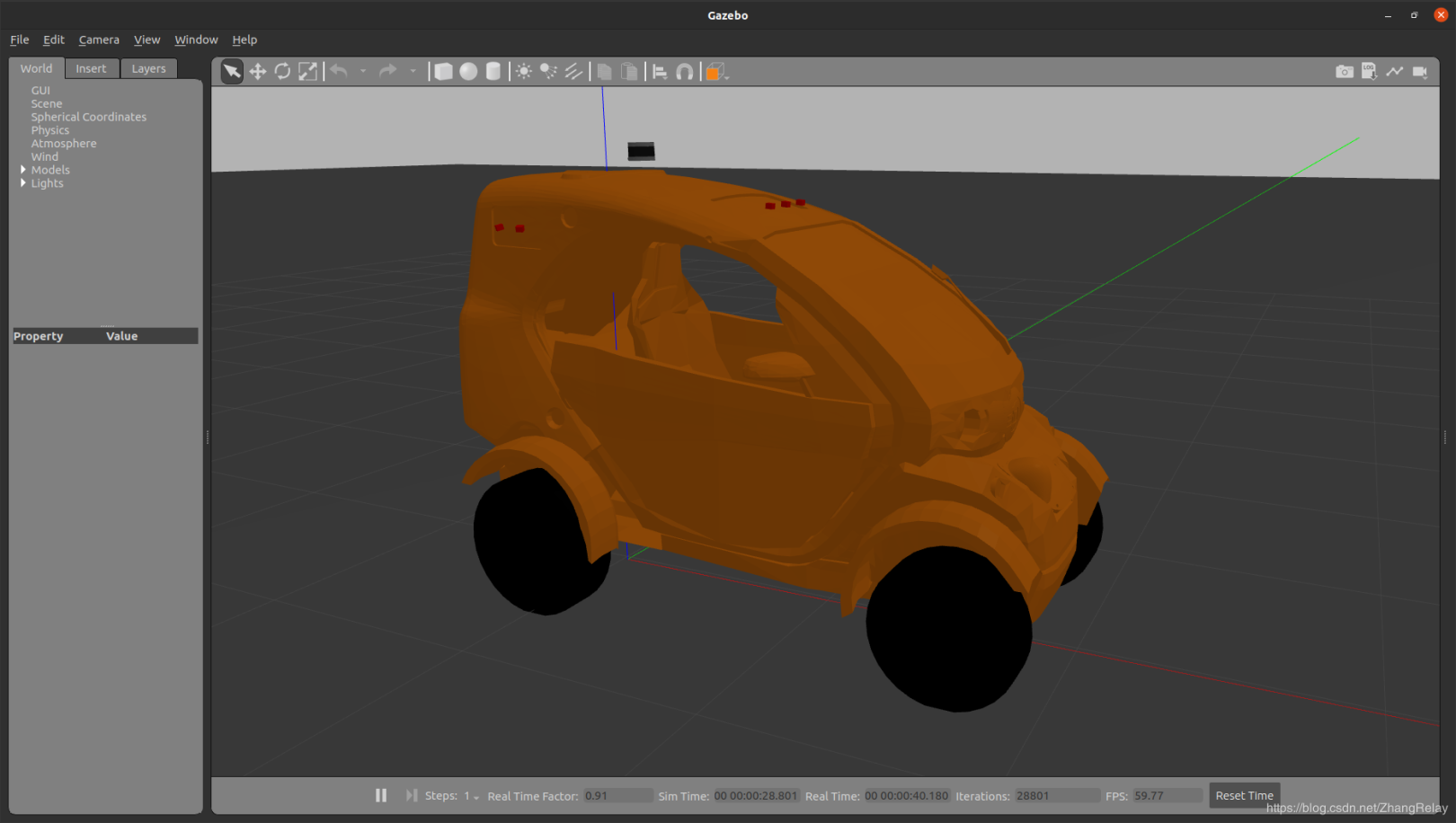
別の例として、キネティックとメロディックは、いくつかの変更を加えるだけで、ノエティックで直接使用できます。
といった:
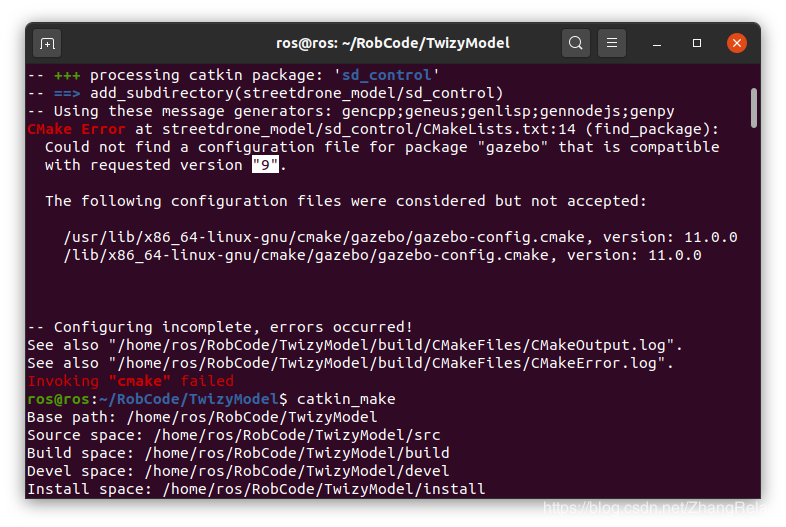
バージョン番号は「9」である必要があります。もちろん、これはgazebo11です。どうすればよいですか?以下を11に変更するだけです。gazeboバージョン間の互換性は依然として非常に良好です。
インストール手順は公式ドキュメントに詳しく記載されていますので、よくお読みください。以前のROS1から大幅に改善され、より簡潔で便利になりました。
LinuxとWindowsのリンクは次のとおりです。
Win10:http://wiki.ros.org/Installation/Windows
ubuntu:http://wiki.ros.org/noetic/Installation/Ubuntu
debian:http://wiki.ros.org/noetic/Installation/Debian
Arch:http://wiki.ros.org/noetic/Installation/ArchLinux
以下は機械翻訳です
[ 世界ROSタートルフェスティバル](https://en.wikipedia.org/wiki/World_Turtle_Day)ハッピー[! ](https://en.wikipedia.org/wiki/World_Turtle_Day)[Open Roboticsは、13番目のROS1リリースであるNoeticNinjemysが利用可能になったことを発表できることを非常に光栄に思います。 ](https://www.openrobotics.org/blog/2020/5/23/noetic-ninjemys-the-last-official-ros-1-release)
ROS Noeticを入手するには? #
[ROS Wiki](http://wiki.ros.org/ROS/Installation)[インストールページ](http://wiki.ros.org/ROS/Installation)のプラットフォームの指示に従ってください。
Noeticの新機能#
まず第一に、Noeticは唯一の [** Python 3 ](https://www.ros.org/reps/rep-0003.html#noetic-ninjemys-may-2020-may-2025) ROS 1バージョンを公式にサポートしています! ****
主な変更点については、「[Noetic Migration Guide」](http://wiki.ros.org/noetic/Migration)および各ソフトウェアパッケージの変更ログを参照して、新機能について理解してください。
Noeticとは何ですか? #
Noeticのこの最初のリリースには** 369 **パッケージが含まれており、ROSKineticの現在の2709はROSMelodicの1939と比較されています。
[ ナビゲーション](http://wiki.ros.org/navigation)と[ros_control](http://wiki.ros.org/ros_control)は[Noetic](https://github.com/ros-planning/moveit/issues/2015)にリリースされ、[MoveIt](https://github.com/ros-planning/moveit/issues/2015)!はまだリリースされていません。
[index.ros.orgのNoeticページ](https://index.ros.org/packages/page/1/released/)または[buildfarm Noeticステータスページ](http://repositories.ros.org/status_page/ros_noetic_default.html)を参照して、使用されているソフトウェアパッケージが利用可能かどうかを確認してください。
**さらに、Ubuntu Focalは32ビットARM(armhf)ソフトウェアパッケージを提供し、UbuntuFocalとDebianBusterは最大64ビットARM(aarch64)ソフトウェアパッケージ ros-noetic-desktopを提供します。 ****
必要なパッケージが利用できない場合はどうなりますか? #
これは初期バージョンのみです!
バッグは、寿命が尽きるまでROSNoeticに追加できます。
これは長期サポート(LTS)バージョンであり、2025年5月までサポートされることを意味します。 ****
公開したいパッケージが見つからない場合は、まず[公開できるかどうかを確認](http://repositories.ros.org/status_page/blocked_releases_noetic.html?s=6&r=1)してから、ソースリポジトリで問題を開いてメンテナに連絡してください。これがうまくいかない場合は、[ROS発話リリースカテゴリ](https://discourse.ros.org/c/release/noetic/66)に入れることができます。
最後に書かれた#
このバージョンの実装を支援してくれたすべてのメンテナと貢献者に感謝します。
私たちはあなたなしではこれを行うことはできません。
ROSチーム