Python implements image stitching
The examples in this article share the specific code of python to realize image stitching for your reference.
- Image to be stitched


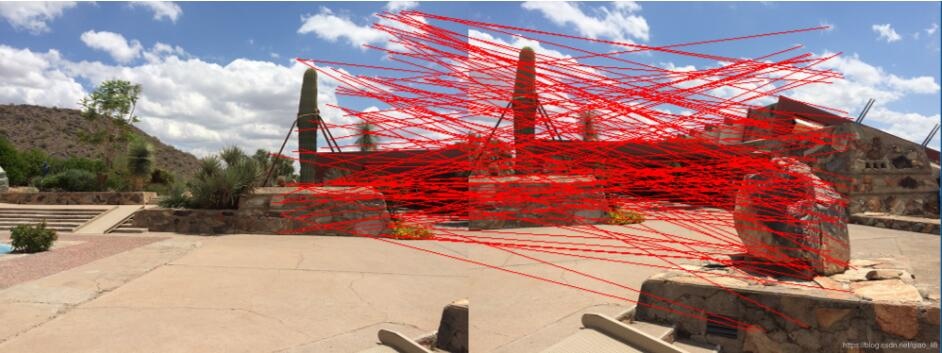
- Image feature point matching results based on SIFT feature points and RANSAC method
- Image transformation result

- Code and precautions
import cv2
import numpy as np
def cv_show(name, image):
cv2.imshow(name, image)
cv2.waitKey(0)
cv2.destroyAllWindows()
def detectAndCompute(image):
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
sift = cv2.xfeatures2d.SIFT_create()(kps, features)= sift.detectAndCompute(image, None)
kps = np.float32([kp.pt for kp in kps]) #The points obtained need to be further converted before they can be used
return(kps, features)
def matchKeyPoints(kpsA, kpsB, featuresA, featuresB, ratio =0.75, reprojThresh =4.0):
# ratio is the recommended threshold for nearest neighbor matching
# reprojThresh is the recommended threshold for random sampling consistency
matcher = cv2.BFMatcher()
rawMatches = matcher.knnMatch(featuresA, featuresB,2)
matches =[]for m in rawMatches:iflen(m)==2 and m[0].distance < ratio * m[1].distance:
matches.append((m[0].queryIdx, m[0].trainIdx))
kpsA = np.float32([kpsA[m[0]]for m in matches]) #Use np.float32 conversion list
kpsB = np.float32([kpsB[m[1]]for m in matches])(M, status)= cv2.findHomography(kpsA, kpsB, cv2.RANSAC, reprojThresh)return(M, matches, status) #Not all points have matching solutions, their status is stored in the status
def stich(imgA, imgB, M):
result = cv2.warpPerspective(imgA, M,(imgA.shape[1]+ imgB.shape[1], imgA.shape[0]))
result[0:imageA.shape[0],0:imageB.shape[1]]= imageB
cv_show('result', result)
def drawMatches(imgA, imgB, kpsA, kpsB, matches, status):(hA, wA)= imgA.shape[0:2](hB, wB)= imgB.shape[0:2]
# Note the 3 channels and uint8 type here
drawImg = np.zeros((max(hA, hB), wA + wB,3),'uint8')
drawImg[0:hB,0:wB]= imageB
drawImg[0:hA, wB:]= imageA
for((queryIdx, trainIdx),s)inzip(matches, status):if s ==1:
# Note that float32-- int
pt1 =(int(kpsB[trainIdx][0]),int(kpsB[trainIdx][1]))
pt2 =(int(kpsA[trainIdx][0])+ wB,int(kpsA[trainIdx][1]))
cv2.line(drawImg, pt1, pt2,(0,0,255))cv_show("drawImg", drawImg)
# Read image
imageA = cv2.imread('./right_01.png')cv_show("imageA", imageA)
imageB = cv2.imread('./left_01.png')cv_show("imageB", imageB)
# Calculate SIFT feature points and feature vectors(kpsA, featuresA)=detectAndCompute(imageA)(kpsB, featuresB)=detectAndCompute(imageB)
# Obtain a homography matrix based on nearest neighbor and random sampling consistency(M, matches, status)=matchKeyPoints(kpsA, kpsB, featuresA, featuresB)
# Draw matching results
drawMatches(imageA, imageB, kpsA, kpsB, matches, status)
# Splicing
stich(imageA, imageB, M)
The above is the whole content of this article, I hope it will be helpful to everyone's study.
Recommended Posts