Pythonは画像スティッチングを実装しています
この記事の例では、参考のためにpythonで画像スティッチングを実装するための特定のコードを共有しています。具体的な内容は次のとおりです。
- ステッチする画像


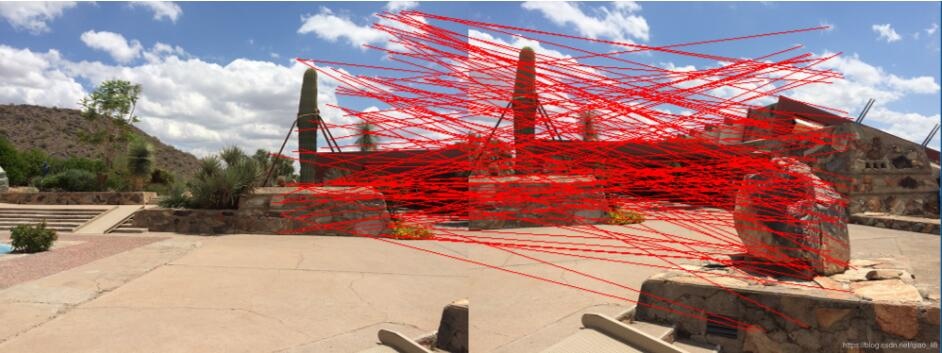
- SIFT特徴点とRANSAC法に基づく画像特徴点マッチング結果
- 画像変換結果

- コードとメモ
import cv2
import numpy as np
def cv_show(name, image):
cv2.imshow(name, image)
cv2.waitKey(0)
cv2.destroyAllWindows()
def detectAndCompute(image):
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
sift = cv2.xfeatures2d.SIFT_create()(kps, features)= sift.detectAndCompute(image, None)
kps = np.float32([kp.pt for kp in kps]) #得られたポイントは、使用する前にさらに変換する必要があります
return(kps, features)
def matchKeyPoints(kpsA, kpsB, featuresA, featuresB, ratio =0.75, reprojThresh =4.0):
# 比率は、最近傍マッチングの推奨しきい値です
# reprojThreshは、ランダムサンプリングの一貫性のための推奨しきい値です。
matcher = cv2.BFMatcher()
rawMatches = matcher.knnMatch(featuresA, featuresB,2)
matches =[]for m in rawMatches:iflen(m)==2 and m[0].distance < ratio * m[1].distance:
matches.append((m[0].queryIdx, m[0].trainIdx))
kpsA = np.float32([kpsA[m[0]]for m in matches]) #npを使用する.float32変換リスト
kpsB = np.float32([kpsB[m[1]]for m in matches])(M, status)= cv2.findHomography(kpsA, kpsB, cv2.RANSAC, reprojThresh)return(M, matches, status) #すべてのポイントに一致するソリューションがあるわけではなく、それらのステータスはステータスに保存されます
def stich(imgA, imgB, M):
result = cv2.warpPerspective(imgA, M,(imgA.shape[1]+ imgB.shape[1], imgA.shape[0]))
result[0:imageA.shape[0],0:imageB.shape[1]]= imageB
cv_show('result', result)
def drawMatches(imgA, imgB, kpsA, kpsB, matches, status):(hA, wA)= imgA.shape[0:2](hB, wB)= imgB.shape[0:2]
# ここで3つのチャネルとuint8タイプに注意してください
drawImg = np.zeros((max(hA, hB), wA + wB,3),'uint8')
drawImg[0:hB,0:wB]= imageB
drawImg[0:hA, wB:]= imageA
for((queryIdx, trainIdx),s)inzip(matches, status):if s ==1:
# float32に注意してください-- int
pt1 =(int(kpsB[trainIdx][0]),int(kpsB[trainIdx][1]))
pt2 =(int(kpsA[trainIdx][0])+ wB,int(kpsA[trainIdx][1]))
cv2.line(drawImg, pt1, pt2,(0,0,255))cv_show("drawImg", drawImg)
# 画像を読む
imageA = cv2.imread('./right_01.png')cv_show("imageA", imageA)
imageB = cv2.imread('./left_01.png')cv_show("imageB", imageB)
# SIFT特徴点と特徴ベクトルを計算する(kpsA, featuresA)=detectAndCompute(imageA)(kpsB, featuresB)=detectAndCompute(imageB)
# 最も近い隣人とランダムサンプリングの一貫性に基づいてホモグラフィマトリックスを取得します(M, matches, status)=matchKeyPoints(kpsA, kpsB, featuresA, featuresB)
# 一致する結果を描画する
drawMatches(imageA, imageB, kpsA, kpsB, matches, status)
# スプライシング
stich(imageA, imageB, M)
以上が本稿の内容ですので、皆様のご勉強に役立てていただければ幸いです。
Recommended Posts